题目内容
3.关于地球同步卫星的说法正确的是( )| A. | 运动周期与地球的自转周期相同 | |
| B. | 运动轨迹一定在赤道平面内 | |
| C. | 距离地面的高度可以有不同的数值 | |
| D. | 向心加速度的大小可能等于地球表面处的重力加速度 |
分析 了解同步卫星的含义,即同步卫星的周期必须与地球自转周期相同.
物体做匀速圆周运动,它所受的合力提供向心力,也就是合力要指向轨道平面的中心.
通过万有引力提供向心力,列出等式通过已知量确定未知量.
解答 解:A、同步卫星的周期必须与地球自转周期相同.故A正确.
B、它若在除赤道所在平面外的任意点,假设实现了“同步”,那它的运动轨道所在平面与受到地球的引力就不在一个平面上,这是不可能的.故B正确.
C、根据万有引力提供向心力,列出等式:$\frac{GMm}{(R+h)^{2}}$=m$\frac{4{π}^{2}}{{T}^{2}}$(R+h),其中R为地球半径,h为同步卫星离地面的高度.由于同步卫星的周期必须与地球自转周期相同,所以T为一定值,根据上面等式得出:同步卫星离地面的高度h也为一定值,故C错误.
D、根据$\frac{GMm}{{r}^{2}}$=mg=man,得an=$\frac{GM}{{r}^{2}}$,卫星的轨道半径越大,向心加速度越小,则同步卫星的向心加速度小于近地卫星的向心加速度,而近地卫星的向心加速度约为g,故知同步卫星的向心加速度小于地球表面处重力加速度g.故D错误.
故选:AB.
点评 地球质量一定、自转速度一定,同步卫星要与地球的自转实现同步,就必须要角速度与地球自转角速度相等,这就决定了它的轨道高度和线速度大小,注意区分向心加速度与重力加速度的不同.

练习册系列答案
相关题目
14.如图所示是某导体的I-U图线,图中α=45°,下列说法正确的是( )
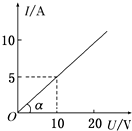
| A. | 此导体的电阻R=0.5Ω | |
| B. | 通过电阻的电流与其两端的电压成正比 | |
| C. | IU图线的斜率表示电阻的倒数,所以R=cot45°=1.0Ω | |
| D. | 在R两端加6.0 V电压时,每秒通过电阻截面的电荷量是3.0C |
18.A,B两小球那在水平面上做匀速圆周运动,A球的轨道半径是B球轨道半径的2倍,A的转速为15r/min,B的转速度为30r/min,则两球的线速度大小之比为( )
| A. | 4:1 | B. | 2:1 | C. | 1:1 | D. | 1:2 |
8. 用伏安法测电阻的实验,可以采用图示a、b两种方法把伏特表和安培表连人电路,这样测量出来的电阻值与被测电阻的真实阻值比较,下列正确的是( )
用伏安法测电阻的实验,可以采用图示a、b两种方法把伏特表和安培表连人电路,这样测量出来的电阻值与被测电阻的真实阻值比较,下列正确的是( )
用伏安法测电阻的实验,可以采用图示a、b两种方法把伏特表和安培表连人电路,这样测量出来的电阻值与被测电阻的真实阻值比较,下列正确的是( )| A. | 两种接法的测量值都小于真实值 | B. | 采用a图接法,测量值小于真实值 | ||
| C. | 采用b图接法,测量值大于真实值 | D. | 两种接法的测量值都大于真实值 |

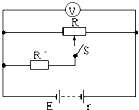 如图电路中变阻器的总电阻R=8Ω,滑动片P置于R正中间,当开关断开时,电源消耗的总功率为5.6W,电压表示数为6.4V,开关接通时,电压表示数为6.25V,求
如图电路中变阻器的总电阻R=8Ω,滑动片P置于R正中间,当开关断开时,电源消耗的总功率为5.6W,电压表示数为6.4V,开关接通时,电压表示数为6.25V,求
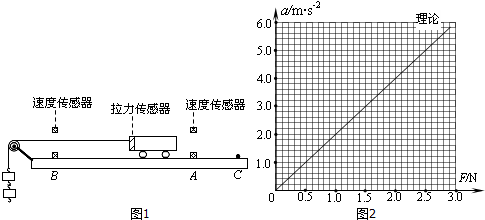
13.现要用如图1所示装置探究“物体的加速度与受力的关系”,小车所受拉力及其速度大小可分别由拉力传感器和速度传感器记录下来.速度传感器安装在距离L=48.0cm的长木板的A、B两点.
①实验主要步骤如下:
A.将拉力传感器固定在小车上;
B.把细线的一端固定在拉力传感器上,另一端通过定滑轮与钩码相连;
C.接通电源后自C点释放小车,小车在细线拉动下运动,记录细线拉力F的大小及小车分别到达A、B时的速率vA、vB;
D.改变所挂钩码的数量,重复D的操作.
②表中记录了实验测得的几组数据,v${\;}_{B}^{2}$-v${\;}_{A}^{2}$是两个速度传感器记录的速率的平方差,则加速度的表达式a=$\frac{{{v}_{B}}^{2}-{{v}_{A}}^{2}}{2L}$.表中的第3次实验数据应该为a=2.44m/s2(结果保留三位有效数字).
③如图2所示的坐标纸上已经绘出了理论上的a-F图象.请根据表中数据,在坐标纸上作出由实验测得的a-F图线.
④对比实验结果与理论计算得到的两个关系图线,分析造成上述偏差的主要原因是没有完全平衡摩擦力或拉力传感器读数总是偏大.根据你作出的a-F图象能(填“能”或“不能”)求出小车和拉力传感器的总质量.
①实验主要步骤如下:
A.将拉力传感器固定在小车上;
B.把细线的一端固定在拉力传感器上,另一端通过定滑轮与钩码相连;
C.接通电源后自C点释放小车,小车在细线拉动下运动,记录细线拉力F的大小及小车分别到达A、B时的速率vA、vB;
D.改变所挂钩码的数量,重复D的操作.
②表中记录了实验测得的几组数据,v${\;}_{B}^{2}$-v${\;}_{A}^{2}$是两个速度传感器记录的速率的平方差,则加速度的表达式a=$\frac{{{v}_{B}}^{2}-{{v}_{A}}^{2}}{2L}$.表中的第3次实验数据应该为a=2.44m/s2(结果保留三位有效数字).
| 次数 | F(N) | vB2-vA2(m2/s2) | a(m/s2) |
| 1 | 0.60 | 0.77 | 0.80 |
| 2 | 1.04 | 1.61 | 1.68 |
| 3 | 1.42 | 2.34 | |
| 4 | 2.62 | 4.65 | 4.84 |
| 5 | 3.00 | 5.49 | 5.72 |
④对比实验结果与理论计算得到的两个关系图线,分析造成上述偏差的主要原因是没有完全平衡摩擦力或拉力传感器读数总是偏大.根据你作出的a-F图象能(填“能”或“不能”)求出小车和拉力传感器的总质量.