题目内容
(1)“验证机械能守恒定律”的实验可以采用如图所示的(甲)或(乙)方案来进行。
①比较这两种方案, (填“甲”或“乙”)方案好些。
②如图是该实验中得到的一条纸带,测得每两个计数点间的距离如图中所示,已知相邻两个计数点之间的时间间隔T=0.1s.物体运动的加速度a= ;该纸带是采用 (填“甲”或“乙”)实验方案得到的.
(2)如图a,某同学要测量滑块与长木板间的动摩擦因数μ,没有打点计时器,他用一滴瓶作计时工具,已知从滴瓶的滴管中每隔一定时间会有一小液滴落下,将滴瓶放在滑块上,取一带有均匀刻度线的长木板,木板水平放置时,滑块放在木板左端,然后轻推滑块,给它一向右的初速度,结果在木板上得到如图b所示的液滴点迹;若将木板的右端A适当抬起,使木板与水平方向成a角,然后让滑块在A端开始下滑,结果在木板上得到如图c所示的液滴点迹,则根据图b、c可计算得到动摩擦因数μ= .
⑴ ① 甲 ②4.8m/s2 乙 ⑵ 
解析试题分析:⑴ ①机械能守恒的前提是只有重力做功,实际操作的方案中应该使摩擦力越小越好.甲方案好一些,因为这个方案摩擦阻力较小,误差小,操作方便,实验器材少②由于相邻的计数点位移之差不等,采用逐差法求解加速度.根据运动学公式得:△x=aT2,a= =4.8m/s2,该纸带是采用乙实验方案得到的.因为物体运动的加速度比重力加速度小很多.
=4.8m/s2,该纸带是采用乙实验方案得到的.因为物体运动的加速度比重力加速度小很多.
(2)设每小格长度为l,滴水间隔为T;由b图,根据公式△x=aT2,有:a1= ;由C图,根据公式△x=aT2,有:a2=
;由C图,根据公式△x=aT2,有:a2= ;根据牛顿第二定律,有:a1=μg;mgsinα-μmgcosα=ma2;联立解得:
;根据牛顿第二定律,有:a1=μg;mgsinα-μmgcosα=ma2;联立解得:
考点:本题考查Δx=aT2的应用。

 黄冈天天练口算题卡系列答案
黄冈天天练口算题卡系列答案两位同学在实验室利用如图(a)所示的电路测定定值电阻R0、电源的电动势E和内电阻r,调节滑动变阻器的滑动触头P向某一方向移动时,一个同学记录了电流表A和电压表V1的测量数据,另一同学记录的是电流表A和电压表V2的测量数据.并根据数据描绘了如图(b)所示的两条U—I直线。请回答下列问题:
(1)根据两位同学描绘的直线,可知图线 (填“甲”或“乙”)是根据电压表V1和电流表A的数据所描绘的。
(2)图象中两直线的交点表示( )
| A.滑动变阻器的滑动头P滑到了最右端 |
| B.在本电路中该电源的输出功率最大 |
| C.定值电阻R0上消耗的功率为0.5W |
| D.在本电路中该电源的效率达到最大值 |


(14分)某研究性学习小组利用如图1所示的实验装置验证 、
、 组成的系统机械能守恒.从高处由静止开始下落,上拖着的纸带打出一系列的点,对纸带上的点迹进行测量,即可验证机械能守恒定律.图2给出的是实验中获取的一条纸带:0是打下的第一个点,每相邻两计数点间还有4个点(图中未标出),计数点间的距离如图所示.已知
组成的系统机械能守恒.从高处由静止开始下落,上拖着的纸带打出一系列的点,对纸带上的点迹进行测量,即可验证机械能守恒定律.图2给出的是实验中获取的一条纸带:0是打下的第一个点,每相邻两计数点间还有4个点(图中未标出),计数点间的距离如图所示.已知 、
、 ,则(
,则( 取10m/s2)
取10m/s2)
①下面列举了该实验的几个操作步骤:
| A.按照图示的装置安装器件; |
| B.将打点计时器接到直流电源上; |
| C.先释放,再接通电源打出一条纸带; |
| D.测量纸带上某些点间的距离. |
其中操作不当的步骤是: .(填选项对应的字母).
②在纸带上打下记数点5时的速度
 = m/s(结果保留两位有效数字);
= m/s(结果保留两位有效数字);③在打点0~5过程中系统动能的增量
 = J(结果保留两位有效数字),系统势能的减少量
= J(结果保留两位有效数字),系统势能的减少量 = J(结果保留两位有效数字),由此得出的结论是 ;
= J(结果保留两位有效数字),由此得出的结论是 ;④若某同学作出
 图像如题6(2)图3,写出计算当地重力加速度的表达式 ,并计算出当地的实际重力加速度=
图像如题6(2)图3,写出计算当地重力加速度的表达式 ,并计算出当地的实际重力加速度=  .
. (1)某同学在做“描绘小电珠的伏安特性曲线”的实验中,开关S闭合之前,图甲中滑动变阻器的滑片应该置于 端(选填“A”、“B”或“AB中间”),并用笔画线代替导线,将图甲中的实验电路连接完整。
(2)实验中测得有关数据如下表:得到如下一组U和I的数据:
| 编号 | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 |
| U(伏) | 0 | 0.50 | 1.00 | 1.50 | 2.00 | 2.20 | 2.60 | 3.00 |
| I(安) | 0 | 0.050 | 0.100 | 0.150 | 0.180 | 0.190 | 0.200 | 0.205 |
| 灯泡发光情况 | 不亮 微亮 逐渐变亮 正常发光 | |||||||
(3)从图线上可以看出,当功率逐渐增大时,灯丝电阻的变化情况是 。
(4)当灯泡电压为1.4V时的功率为 W(保留两位有效数字)。


(9分)如图所示,某实验小组同学利用DIS实验装置研究支架上力的分解,A、B为两个相同的双向力传感器,该型号传感器在受到拉力时读数为正,受到压力时读数为负,A连接质量不计的细绳,可沿固定的板做圆弧形移动,B固定不动,通过光滑铰链连接长0.3m的杆,将细绳连接在杆的右端O点构成支架,保持杆在水平方向,按如下步骤操作: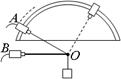
①测量绳子与水平杆的夹角∠AOB=θ; ②对两个传感器进行调零;
③用另一根绳在O点悬挂一个钩码,记录两个传感器的读数; ④取下钩码,移动传感器A改变θ角。
重复上述实验步骤,得到表格:
| F1/N | 1.001 | 0.580 | … | 1.002 | … |
| F2/N | -0.868 | -0.291 | … | 0.865 | … |
| θ | 30° | 60° | … | 150° | … |
⑵本实验中多次测量对传感器进行调零,对此操作说明正确的是 。
A.因为事先忘记调零
B.何时调零对实验结果没有影响
C.为了消除横杆自身重力对结果的影响
D.可以完全消除实验的误差