题目内容
【题目】当今人工智能技术迅猛发展,电池是新型人工智能机器人的重要部分,某新型机器人上的一节电池的电动势约为3V,内阻约为2~7Ω,为测量该电池的电动势和内阻,实验室可供选用的器材如下:
A.待测电池
B.定值电阻R0(R0=1.8Ω)
C.电压表V(量程3V,内阻约2kΩ)
D.电流表A(量程0.6A,内阻RA=1.2Ω)
E.电阻箱(0~99.99Ω,额定电流1.5A)
F.开关一个、导线若干
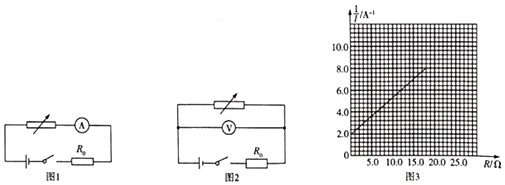
(1)甲、乙两位同学为测量出该电池的电动势和内阻,各自想出了自己的测量方法,设计电路分别如图1、图2所示,则你认为合理的是______。
A.甲的设计
B.乙的设计
C.误差几乎一样,都可以
D.两人的设计都不行
(2)如果按甲同学所设计的电路进行测量得到电阻箱的电阻R和电流表的读数I以及计算出![]() 的多组数据后,作出了如图3所示的
的多组数据后,作出了如图3所示的![]() -R图象。请你帮助他分析计算电池的电动势E=______V,内阻r=______Ω.(结果均保留一位小数)
-R图象。请你帮助他分析计算电池的电动势E=______V,内阻r=______Ω.(结果均保留一位小数)
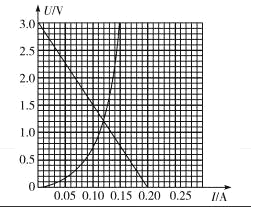
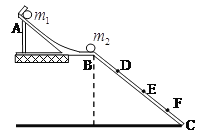
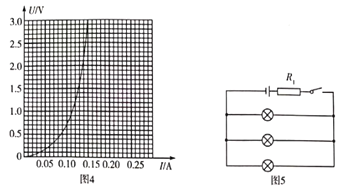
(3)已知某个小灯泡的U-I图象如图4所示,把三只这样的相同的小灯泡并联后与R1一起接在第(2)问中已经测量的电池上,电路图如图5所示。已知R1=2Ω,则闭合开关电路稳定后,其中一个小灯泡的电阻为______Ω,功率为______W.(结果均保留三位有效数字)
【答案】A 3.0 3.0 10.0 0.144
【解析】
(1)由于甲同学所设计的电路中电流表内阻已知,可减小测量误差,故甲同学的实验电路更合理些;
(2)根据E=I(R+r+RA+R0),得到:![]() ,结合图象斜率和截距得到:E=3.0V,r=3.0Ω;
,结合图象斜率和截距得到:E=3.0V,r=3.0Ω;
(3)设每个小灯泡的电压、电流分别为U、I,结合电路,可得U=E-3I(r+R1),即U=-15I+3(V),在U-I图象中做出此图线,如图所示,交点(0.12A,1.2V)即为一个小灯泡的工作状态,则得到一个小灯泡的电阻RL=1.2V÷0.12V=10.0Ω,一个小灯泡的工作时的功率为:PL=1.2V×0.12A=0.144W。