题目内容
2. 如图所示,质量为m3=4kg的滑道静止在光滑的水平面上,滑道的AB部分是半径为R=2m的四分之一圆弧,圆心0在B点正上方,其他部分水平,在滑道右侧固定一轻弹簧,滑道除 CD部分粗糙外其他部分均光滑.质量为m2=3kg的物体2( 可视为质点)放在滑道上的B点,现让 质量为m1=1kg的物体(可视为质点)自A点上方R处由静止释放.两物体在滑道上的C点相碰后粘在一起(g=10m/s2),求:
如图所示,质量为m3=4kg的滑道静止在光滑的水平面上,滑道的AB部分是半径为R=2m的四分之一圆弧,圆心0在B点正上方,其他部分水平,在滑道右侧固定一轻弹簧,滑道除 CD部分粗糙外其他部分均光滑.质量为m2=3kg的物体2( 可视为质点)放在滑道上的B点,现让 质量为m1=1kg的物体(可视为质点)自A点上方R处由静止释放.两物体在滑道上的C点相碰后粘在一起(g=10m/s2),求:(1)物体1第一次到达B点时的速度大小;
(2)B点和C点之间的距离;
(3)若CD=0.3m,两物体与滑道CD部分间的动摩擦因数都为0.2,两物体最后一次压缩弹簧时,求弹簧的最大弹性势能的大小.
分析 (1)物体1从释放到B点的过程中,物体2由于不受摩擦力,相对于地面静止不动.物体1和滑道组成的系统水平不受外力,水平动量守恒,根据水平动量守恒和系统的机械能守恒分别列式,求出物体1第一次到达B点时的速度大小;
(2)B点和C点之间的距离即为滑道在两个物体碰撞前向左滑动的距离.用位移与时间的比值表示平均速度,根据物体1和滑道的水平动量守恒列式,求出滑道向左运动的距离,即可得解.
(3)物体1从释放到与物体2相碰前的过程中,系统中只有重力做功,系统的机械能守恒,根据机械能守恒和动量守恒列式,可求出物体1、2碰撞前两个物体的速度;物体1、2碰撞过程,根据动量守恒列式求出碰后的共同速度.碰后,物体1、2向右运动,滑道向左运动,弹簧第一次压缩最短时,根据系统的动量守恒得知,物体1、2和滑道速度为零,此时弹性势能最大.根据能量守恒定律求解在整个运动过程中,弹簧具有的最大弹性势能.
解答 解:(1)物体1由静止到第一次到达B点的过程,物体2始终静止,以物体1和滑道为研究对象,水平方向的动量守恒,取水平向右为正方向,则有:
m1v1-m3v3=0
根据系统的机械能守恒得:m1g•2R=$\frac{1}{2}$m1v12+$\frac{1}{2}$m3v32
联立解得 v1=8m/s,v3=2m/s
(2)两物体在滑道上的C点相碰后粘在一起,故B点和C点之间的距离即为滑道在两个物体碰撞前向左滑动的距离.物体1从释放到与相碰撞的过程中,物体1和滑道组成的系统水平方向动量守恒,设物体1的水平位移大小为s1,滑道水平位移大小s3,有:
0=m1$\frac{{s}_{1}}{t}$-m3$\frac{{s}_{3}}{t}$=0
又s1+s3=R
可以求得 s3=0.4m
所以B点和C点之间的距离是0.4m.
(3)设物体1和物体2相碰后的共同速度设为v2.取向右为正方向,由动量守恒定律有 m1v1=(m1+m2)v2
由于物体1、物体2和滑道整体在水平方向动量守恒,弹簧第一次压缩最短时由动量守恒定律可知物体1、2和滑道速度为零,此时弹性势能最大,设为EPm.
根据能量转化和守恒定律得:$\frac{1}{2}$(m1+m2)v22+$\frac{1}{2}$m3v32-μ(m1+m2)g$\overline{CD}$=EPm
联立以上方程,代入数据可以求得,EPm=$\frac{253}{15}$J
答:
(1)物体1第一次到达B点时的速度大小是2m/s;
(2)B点和C点之间的距离是0.4m;
(3)弹簧的最大弹性势能的大小是$\frac{253}{15}$J.
点评 本题是系统水平方向动量守恒和能量守恒的问题,用位移与时间之比表示速度是常用的方法.要正确分析能量是如何转化,能运用能量守恒定律求弹性势能.

 天天向上一本好卷系列答案
天天向上一本好卷系列答案 小学生10分钟应用题系列答案
小学生10分钟应用题系列答案 扫地机器人是智能家用电器的一种,它利用自身携带的小型吸尘部件进行吸尘清扫,如图所示为科沃斯扫地机器人,已知其工作额定电压为12V,额定功率为30W,充电额定电压为15V,额定电流为0.75A,充电时间约为4h,电池容量为2000mAh,则下列说法错误的是( )
扫地机器人是智能家用电器的一种,它利用自身携带的小型吸尘部件进行吸尘清扫,如图所示为科沃斯扫地机器人,已知其工作额定电压为12V,额定功率为30W,充电额定电压为15V,额定电流为0.75A,充电时间约为4h,电池容量为2000mAh,则下列说法错误的是( )| A. | 机器人正常工作的电压为12V | |
| B. | 机器人正常工作时电流为2.5A | |
| C. | 电池容量是指电池储存电能的大小 | |
| D. | 机器人充满电后一次工作时间最多约为0.8h |
 对一定质量的某种气体,在某一状态变化过程中压强p与热力学温度T的关系如图所示,则描述压强p与摄氏温度t的关系图象中正确的是( )
对一定质量的某种气体,在某一状态变化过程中压强p与热力学温度T的关系如图所示,则描述压强p与摄氏温度t的关系图象中正确的是( )




| A. | 两球在t=2 s时速度相同 | B. | 两球在t=8 s时相遇 | ||
| C. | 两球在t=5 s时相距最远 | D. | 在2~8 s内,两球的加速度大小相等 |
 长L=0.5m的轻杆,其一端连接着一个物体A,A的质量m=2kg.现让A在竖直平面内绕O点做圆周运动,如图所示.(g=10m/s2)
长L=0.5m的轻杆,其一端连接着一个物体A,A的质量m=2kg.现让A在竖直平面内绕O点做圆周运动,如图所示.(g=10m/s2)  轻绳一端固定在光滑轴O上,另一端系一质量为m的小球,在最低点给小球一初速度,使其在竖直平面内做圆周运动,且恰好能通过最高点P.下列说法正确的是( )
轻绳一端固定在光滑轴O上,另一端系一质量为m的小球,在最低点给小球一初速度,使其在竖直平面内做圆周运动,且恰好能通过最高点P.下列说法正确的是( )| A. | 小球在最低点时对绳的拉力为零 | |
| B. | 小球在最高点时对绳的拉力大小mg | |
| C. | 若增大小球的初速度,则过最高点时球对绳的力一定增大 | |
| D. | 若增大小球的初速度,则在最低点时球对绳的力不一定增大 |
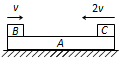 质量为m的长木板A静止在光滑水平面上,另两个质量也是m的铁块B、C同时从A的左右两端滑上A的上表面,初速度大小分别为v和2v,B、C与A间的动摩擦因数均为μ.已知以后的运动过程中B、C始终没有相撞.
质量为m的长木板A静止在光滑水平面上,另两个质量也是m的铁块B、C同时从A的左右两端滑上A的上表面,初速度大小分别为v和2v,B、C与A间的动摩擦因数均为μ.已知以后的运动过程中B、C始终没有相撞. 将一单摆向左拉至水平标志线上,从静止释放,当摆球运动到最低点时,摆线碰到障碍物,摆球继续向右摆动.用频闪照相机拍到如图所示的单摆运动过程的频闪照片,以下说法正确的是( )
将一单摆向左拉至水平标志线上,从静止释放,当摆球运动到最低点时,摆线碰到障碍物,摆球继续向右摆动.用频闪照相机拍到如图所示的单摆运动过程的频闪照片,以下说法正确的是( )| A. | 摆线碰到障碍物前后的摆长之比为3:2 | |
| B. | 摆线碰到障碍物前后的摆长之比为9:4 | |
| C. | 摆线经过最低点时,线速度不变,半径减小,摆线张力变大 | |
| D. | 摆线经过最低点时,角速度变大,半径减小,摆线张力不变 |
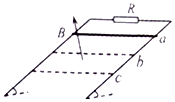 如图所示,上端接有一电阻R的光滑平行金属导轨倾斜放置在匀强磁场中,磁场的方向垂直导轨平面,一金属棒与导轨垂直放置,以初速度v0从a处向下滑动,金属棒经b点滑到c处,已知ab=bc,忽略其他电阻,则金属棒在经过ab和bc的两个过程中( )
如图所示,上端接有一电阻R的光滑平行金属导轨倾斜放置在匀强磁场中,磁场的方向垂直导轨平面,一金属棒与导轨垂直放置,以初速度v0从a处向下滑动,金属棒经b点滑到c处,已知ab=bc,忽略其他电阻,则金属棒在经过ab和bc的两个过程中( )| A. | 安培力做功一定相等 | B. | 通过棒的电荷量一定相等 | ||
| C. | 棒运动的加速度一定相等 | D. | 回路中产生的内能一定相等 |