题目内容
 在直角坐标平面内,O为原点,点A的坐标为(1,0),点C的坐标为(0,4),直线CM∥x轴(如图所示),点B与点A关于原点对称,直线y=x+b(b为常数)经过点B,且与直线CM相交点D,连接OD,设P在x轴的正半轴上,若△POD为等腰三角形,则点P的坐标为
在直角坐标平面内,O为原点,点A的坐标为(1,0),点C的坐标为(0,4),直线CM∥x轴(如图所示),点B与点A关于原点对称,直线y=x+b(b为常数)经过点B,且与直线CM相交点D,连接OD,设P在x轴的正半轴上,若△POD为等腰三角形,则点P的坐标为(5,0);(6,0);(
,0)
| 25 |
| 6 |
(5,0);(6,0);(
,0)
.| 25 |
| 6 |
分析:如图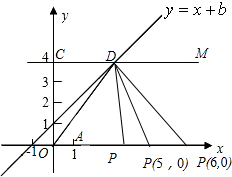
对称点到对称中心的距离相等可求出对称点;待定系数法求y=x+b解析式,把(-1,0)代入y=x+b(b为常数);二元一次方程组的解是直线的交点,求交点坐标,
;两边相等的三角形是等腰三角形可确定△POD;分类讨论当OD=OP=5时,P点坐标是(5,0);当OD=PD=5时,P点坐标是(6,0);当OP=PD=
时,P点坐标是(
,0).
对称点到对称中心的距离相等可求出对称点;待定系数法求y=x+b解析式,把(-1,0)代入y=x+b(b为常数);二元一次方程组的解是直线的交点,求交点坐标,
|
| 25 |
| 6 |
| 25 |
| 6 |
解答:解:∵点A的坐标为(1,0),点B与点A关于原点对称
∴B点坐标(-1,0);
∵直线y=x+b(b为常数)经过点B(-1,0),
∴直线y=x+b(b为常数)的解析式 y=x+1
∵点C的坐标为(0,4),直线CM∥x轴(如图所示),
∴直线CM为y=4
∵直线y=x+1(b为常数)经过点B,且与直线CM:y=4 相交点D,
∴D点坐标是(3,4);
当OD=OP=5时,P点坐标是(5,0);当OD=PD=5时,P点坐标是(6,0);当OP=PD=
时,P点坐标是(
,0)
综上所述,P点坐标是(5,0);(6,0);(
,0).
故答案为:(5,0);(6,0);(
,0).
∴B点坐标(-1,0);
∵直线y=x+b(b为常数)经过点B(-1,0),
∴直线y=x+b(b为常数)的解析式 y=x+1
∵点C的坐标为(0,4),直线CM∥x轴(如图所示),
∴直线CM为y=4
∵直线y=x+1(b为常数)经过点B,且与直线CM:y=4 相交点D,
∴D点坐标是(3,4);
当OD=OP=5时,P点坐标是(5,0);当OD=PD=5时,P点坐标是(6,0);当OP=PD=
| 25 |
| 6 |
| 25 |
| 6 |
综上所述,P点坐标是(5,0);(6,0);(
| 25 |
| 6 |
故答案为:(5,0);(6,0);(
| 25 |
| 6 |
点评:本题考查了一次函数与二元一次方程组的关系,等腰三角形.要注意△POD为等腰三角形,点P的坐标有三个.

练习册系列答案
相关题目
 在直角坐标平面内,已点A(3,0)、B(-5,3),将点A向左平移6个单位到达C点,将点B向下平移6个单位到达D点.
在直角坐标平面内,已点A(3,0)、B(-5,3),将点A向左平移6个单位到达C点,将点B向下平移6个单位到达D点.在直角坐标平面内的机器人接受指令“[a,A]”(a≥0,0°<A<180°)后的行动结果为:在原地顺时针旋转A后,再向正前方沿直线行走a个单位长度.若机器人的位置在原点,正前方为y轴的负半轴,则它完成一次指令[2,60°]后位置的坐标为( )
A、(-1,
| ||
B、(-1,-
| ||
C、(-
| ||
D、(-
|