摘要:16.杠杆的平衡条件是 .如图所示杠杆处平衡状态.则L1= L2如.
网址:http://m.1010jiajiao.com/timu_id_607566[举报]
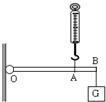 如图所示,手持弹簧测力计竖直向上拉,使杠杆处于水平平衡状态,弹簧测力计的示数是5N,OA=80cm,AB=20cm,则物体的重是( )
如图所示,手持弹簧测力计竖直向上拉,使杠杆处于水平平衡状态,弹簧测力计的示数是5N,OA=80cm,AB=20cm,则物体的重是( )| A、20N | B、4N | C、1.25N | D、条件不足,无法判断 |
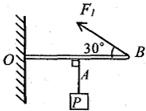 如图所示,不计重力的杠杆OB可绕O点转动,重为10N的重物P悬挂在杠杆的中点A处,拉力F1与杠杆成30°角,杠杆在水平位置保持平衡,根据杠杆的平衡可求出拉力的大小F1=
如图所示,不计重力的杠杆OB可绕O点转动,重为10N的重物P悬挂在杠杆的中点A处,拉力F1与杠杆成30°角,杠杆在水平位置保持平衡,根据杠杆的平衡可求出拉力的大小F1= 如图所示是探究杆杠平衡条件的实验装置.
如图所示是探究杆杠平衡条件的实验装置.(1)调节杠杆两端的螺母,使杠杆在不挂钩码时,保持水平位置平衡这样做的好处是
便于力臂的测量
便于力臂的测量
;(2)若杠杆在使用前发现左端低、右端高,要使它在水平位置平衡,应将杠杆右端的平衡螺母向
右
右
调节;也可将杠杆左端的平衡螺母向右
右
调节,使天平在水平位置平衡.此后,在整个实验过程中,不需要
不需要
(填需要或不需要)旋动两侧的平衡螺母?(3)他实验中得到的三组数据如表所示:
| 实验序号 | 动力F1/N | 动力臂L1/m | 阻力F2/N | 阻力臂L2/m |
| 1 | 2 | 0.2 | 1 | 0.1 |
| 2 | 1 | 0.08 | 2 | 0.04 |
| 3 | 1.5 | 0.1 | 3 | 0.05 |
1
1
次实验的数据肯定有错误.经检查,发现是测量动力臂时读数错了,则动力臂的测量值是偏大
偏大
(选填“偏大”或“偏小”)了.(4)分析比较表中的数据可得到杠杆的平衡条件是
动力×动力臂=阻力×阻力臂(或F1×L1=F2×L2)
动力×动力臂=阻力×阻力臂(或F1×L1=F2×L2)
. 如图所示,小红在探究“杠杆的平衡条件”的实验中所用的器材有:杠杆、支架、刻度尺、细线和若干个质量相同的钩码.
如图所示,小红在探究“杠杆的平衡条件”的实验中所用的器材有:杠杆、支架、刻度尺、细线和若干个质量相同的钩码.(1)实验前,将杠杆中点置于支架上,调节平衡螺母,使杠杆在水平位置平衡,这样做得目的是为了便于测量
力臂
力臂
.(2)杠杆调节平衡后,小红在杠杆上A点处挂4个钩码,为使杠杆重新平衡,应在B点处挂
6
6
个钩码.(3)如果再在A、B两处各挂一个钩码,杠杆的
左
左
端会下沉.此后,小红又经过多次实验,得出的杠杆的平衡条件是F1L1=F2L2
F1L1=F2L2
. 如图所示是某校物理实验小组在探究杠杆平衡条件的实验装置
如图所示是某校物理实验小组在探究杠杆平衡条件的实验装置(1)若发现杠杆在使用前右端低左端高,要使它在水平位置平衡,应将杠杆右端的平衡螺母向
左
左
调节.调节杠杆在水平位置平衡的主要目的是便于测量力臂
便于测量力臂
.(2)一实验小组得到的两组数据如下表所示
| 实验序号 | 动力F1/N | 动力臂l1/cm | 阻力F2/N | 阻力臂l2/cm |
| 1 | 2 | 20 | 1 | 10 |
| 2 | 1 | 8 | 2 | 4 |
1
1
的一组肯定有错误.经检查,发现是测量动力臂时读错了,动力臂的实际值比记录值大还是小?小
小
.(3)另一实验小组按如图乙所示操作,用弹簧测力计在C处竖直向上拉,当弹簧测力计逐渐向右倾斜时,使杠杆仍然在水平位置平衡,则弹簧测力计的示数将
变大
变大
(变大/变小/不变),其原因是力臂变小
力臂变小
.