摘要:在光滑的水平桌面上有一长L=2米的木板C.它的两端各有一块档板.C的质量mC=5千克.在C的正中央并排放着两个可视为质点的滑块A和B.质量分别为mA=1千克.mB=4千克.开始时.A.B.C都处于静止.并且A.B间夹有少量塑胶炸药.如图15-1所示.炸药爆炸使滑块A以6米/秒的速度水平向左滑动.如果A.B与C间的摩擦可忽略.两滑块中任一块与档板碰撞后都与挡板结合成一体.爆炸和碰撞所需时间都可忽略.问: (1)当两滑块都与档板相碰撞后.板C的速度多大? (2)到两个滑块都与档板碰撞为止.板的位移大小和方向如何? 分析与解:(1)设向左的方向为正方向.炸药爆炸前后A和B组成的系统水平方向动量守恒.设B获得的速度为mA.则mAVA+mBVB=0.所以:VB=-mAVA/mB=-1.5米/秒对A.B.C组成的系统.开始时都静止.所以系统的初动量为零.因此当A和B都与档板相撞并结合成一体时.它们必静止.所以C板的速度为零. (2)以炸药爆炸到A与C相碰撞经历的时间:t1=(L/2)/VA=1/6秒. 在这段时间里B的位移为:SB=VBt1=1.5×1/6=0.25米. 设A与C相撞后C的速度为VC.A和C组成的系统水平方向动量守恒:mAVA=(mA+mC)VC. 所以VC=mAVA/(mA+mC)=1×6/(1+5)=1米/秒 B相对于C的速度为: VBC=VB-VC==-2.5米/秒 因此B还要经历时间t2才与C相撞: t2==/2.5=0.3秒. 故C的位移为:SC=VCt2=1×0.3=0.3米. 方向向左.如图15-2所示.
网址:http://m.1010jiajiao.com/timu3_id_1377279[举报]
 在光滑的水平桌面上有一长L=2米的木板C,它的两端各有一块档板,C的质量mC=5千克,在C的正中央并排放着两个可视为质点的滑块A和B,质量分别为mA=1千克,mB=4千克。开始时,A、B、C都处于静止,并且A、B间夹有少量塑胶炸药,如图15-1所示。炸药爆炸使滑块A以6米/秒的速度水平向左滑动,如果A、B与C间的摩擦可忽略,两滑块中任一块与档板碰撞后都与挡板结合成一体,爆炸和碰撞所需时间都可忽略。
在光滑的水平桌面上有一长L=2米的木板C,它的两端各有一块档板,C的质量mC=5千克,在C的正中央并排放着两个可视为质点的滑块A和B,质量分别为mA=1千克,mB=4千克。开始时,A、B、C都处于静止,并且A、B间夹有少量塑胶炸药,如图15-1所示。炸药爆炸使滑块A以6米/秒的速度水平向左滑动,如果A、B与C间的摩擦可忽略,两滑块中任一块与档板碰撞后都与挡板结合成一体,爆炸和碰撞所需时间都可忽略。
(1)当两滑块都与档板相碰撞后,板C的速度多大?
(2)到两个滑块都与档板碰撞为止,板的位移大小和方向如何?
查看习题详情和答案>>在光滑的水平桌面上有一长L=2米的木板C,它的两端各有一块档板,C的质量mC=5千克,在C的正中央并排放着两个可视为质点的滑块A和B,质量分别为mA=1千克,mB=4千克。开始时,A、B、C都处于静止,并且A、B间夹有少量塑胶炸药,如图15-1所示。炸药爆炸使滑块A以6米/秒的速度水平向左滑动,如果A、B与C间的摩擦可忽略,两滑块中任一块与档板碰撞后都与挡板结合成一体,爆炸和碰撞所需时间都可忽略。

小题1:(1)当两滑块都与档板相碰撞后,板C的速度多大?
小题2:(2)到两个滑块都与档板碰撞为止,板的位移大小和方向如何?
小题1:(1)当两滑块都与档板相碰撞后,板C的速度多大?
小题2:(2)到两个滑块都与档板碰撞为止,板的位移大小和方向如何?
 (2008?江苏模拟)用铁架台将长木板倾斜支在水平桌面上,在长木板上安放两个光电门A、B,在一木块上粘一宽度为△x的遮光条.让木块从长木板的顶端滑下,依次经过A、B两光电门,光电门记录的时间分别为△t1和△t2.实验器材还有电源、导线、开关和米尺(图中未画出).
(2008?江苏模拟)用铁架台将长木板倾斜支在水平桌面上,在长木板上安放两个光电门A、B,在一木块上粘一宽度为△x的遮光条.让木块从长木板的顶端滑下,依次经过A、B两光电门,光电门记录的时间分别为△t1和△t2.实验器材还有电源、导线、开关和米尺(图中未画出).(1)为了计算木块运动的加速度,还需测量的物理量是
两光电门间的距离d
两光电门间的距离d
(用字母表示);用题给的条件和你再测量的物理量表示出加速度a=| △x2 |
| 2d |
| 1 | ||
△
|
| 1 | ||
△
|
| △x2 |
| 2d |
| 1 | ||
△
|
| 1 | ||
△
|
(2)为了测定木块与长木板间的动摩擦因数,还需测量的物理量(并用字母表示)
长木板的总长度L,长木板的顶端距桌面的竖直高度h
长木板的总长度L,长木板的顶端距桌面的竖直高度h
;用加速度a,重力加速度g,和你再测量的物理量表示出动摩擦因数μ=| gh-aL | ||
g
|
| gh-aL | ||
g
|
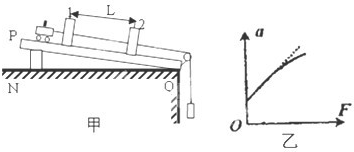
光电门传感器也是一种研究物体运动情况的计时仪器,现利用图甲所示装置设计一个“验证物体产生的加速度与合外力、质量关系”的实验,图中NO是水平桌面,PO是一端带有滑轮的长木板,1、2是固定在木板上的两个光电门.小车上固定着用于挡光的窄片,让小车从木板的顶端滑下,光电门连接数据采集器,并把数据采集器和计算机连接,打开软件.
①该实验中,为了探究a与F 关系,必须使用的物理方法是
②已知窄片的宽度为d,计算机显示的光电门1、2的挡光时间分别为t1、t2.用米尺测量光电门间距为L(L远大于d),则小车的加速度表达式a=
(
-
)
(
-
)(用题中所给的字母表示).
③有位同学通过测量,作出a-F图线,如图乙中的实线所示.试分析:乙中图线不通过坐标原点的原因是
乙中图线上部弯曲的原因是
查看习题详情和答案>>
①该实验中,为了探究a与F 关系,必须使用的物理方法是
控制变量法
控制变量法
.②已知窄片的宽度为d,计算机显示的光电门1、2的挡光时间分别为t1、t2.用米尺测量光电门间距为L(L远大于d),则小车的加速度表达式a=
| d2 |
| 2L |
| 1 |
| t22 |
| 1 |
| t12 |
| d2 |
| 2L |
| 1 |
| t22 |
| 1 |
| t12 |
③有位同学通过测量,作出a-F图线,如图乙中的实线所示.试分析:乙中图线不通过坐标原点的原因是
平衡摩擦力时木板倾角太大
平衡摩擦力时木板倾角太大
;乙中图线上部弯曲的原因是
没有满足小车质量远大于砂和砂桶的质量
没有满足小车质量远大于砂和砂桶的质量
.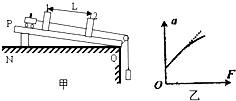 光电门传感器也是一种研究物体运动情况的计时仪器,现利用图甲所示装置设计一个“验证物体产生的加速度与合外力、质量关系”的实验,图中NO是水平桌面,PO是一端带有滑轮的长木板,1、2是固定在木板上的两个光电门.小车上固定着用于挡光的窄片,让小车从木板的顶端滑下,光电门连接数据采集器,并把数据采集器和计算机连接,打开软件.
光电门传感器也是一种研究物体运动情况的计时仪器,现利用图甲所示装置设计一个“验证物体产生的加速度与合外力、质量关系”的实验,图中NO是水平桌面,PO是一端带有滑轮的长木板,1、2是固定在木板上的两个光电门.小车上固定着用于挡光的窄片,让小车从木板的顶端滑下,光电门连接数据采集器,并把数据采集器和计算机连接,打开软件.①已知窄片的宽度为d(L远大于d),计算机显示的光电门1、2的挡光时间分别为t1、t2.②用米尺测量光电门间距为L,则小车的加速度表达式a=
(
| ||||||||
| 2L |
(
| ||||||||
| 2L |
调出一个合适的斜面,轻推小车,使小车恰好能匀速下滑
调出一个合适的斜面,轻推小车,使小车恰好能匀速下滑
.④该实验中,让小车质量M不变时,探究a与F 关系,使用的探究方法是
控制变量法
控制变量法
.有位同学通过测量,作出a-F图线,如图乙中的实线所示.试分析:乙图线不通过坐标原点的原因是
木板夹角过大
木板夹角过大
;乙图线上部弯曲的原因是没有满足小车质量远大于砂和砂桶的质量
没有满足小车质量远大于砂和砂桶的质量
.