摘要:如图49-1所示.三角形ABC为一等腰直角三棱镜的主截面.令一单色光线DE平行于AB面从空气中自AC面射入.经AB面反射后从BC面射出.FG为出射光线.光线DE.FG的走向均可用插针法实验确定出来. (1)试用几何作图法在图中画出在棱镜内的光路走向, (2)证明:射到AB面上的光线一定发生全反射. 分析与解:(1) 光线DE射到AC面上发生折射.折射光线射到AB面上被反射到BC面又从BC面折射出去形成光线FG.题目要求画出棱镜对入射光线的折射→反射→折射的光路.先延长DE与AC的交点为O1.O1是入射点.再反向延长FG.与BC的交点O2.O2是出射点.只要能找出AB面上的反射点P就可以画出准确的光路图. 从O1点射到P点的光线.被AB面反射后.反射光线应从P点射到O2.入射光线O1P和反射光线PO2应符合反射定律.根据反射定律.平面镜成像的对称性.我们可把O1想象成点光源.它的像点O1’关于AB面对称.点光源O1射到AB面上的光线.被AB面反射后都好像由O1’射出的一样.我们连接O1’O2与AB的交点P即为所求. 根据上面的分析得到作图的顺序是:先延长DE.FG确定入射点O1和出射点O2.再作出O1点关于AB的对称点O1’.连接O1’O2与AB交于P点.作O1P是AC折射后射到AB面的入射光线.作PO2是AB面反射光线.光路图如49-2所示. 说明:本题关键是确定P点.重要的一步是把O1设想为点光源.将AB作平面镜处理.十分巧妙. (2)证明:设棱镜折射率为n.在图中.对于△PO1M.其外角∠AMO1=r+α 即:45°=r+α=r+ 所以 i’=45°+r 即:sini’=sin=sin45°cosr+cos45°+sinr [1] 又: 所以sinr=[2] cosr== [3] 把[2].[3]式代入[1]式得:sini’= 由于n>1.所以+1>2 即sini’>.光线射到AB面上一定发生全反射. 原子物理部分
网址:http://m.1010jiajiao.com/timu3_id_1376310[举报]
(08年黄冈市期末)(12分)实验室有如下器材:
仪器 | 数量和规格 |
定值电阻R0 | 一只:阻值为20Ω左右 |
滑动变阻器R1 | 一只:总阻值40Ω |
小量程电流表A | 相同两块:量程100mA,内阻未知 |
电压表V | 相同两块:量程3V,内阻未知 |
直流电源 | 一个:电动势约为4V,内阻约为5Ω |
开关 | 一个:单刀单掷 |
导线 | 若干 |
(1)为测量定值电阻的阻值和两表的内阻,某同学设计了如图10(甲)所示的电路.在某次测量中电压表![]() 的示数分别为1.20V、1.45V;电流表
的示数分别为1.20V、1.45V;电流表![]() 的示数分别为48.0mA、49.0mA,则定值电阻的阻值R0=___________Ω;电流表的内阻RA=___________Ω;电压表的内阻RV=___________Ω.(结果保留三位有效数字)
的示数分别为48.0mA、49.0mA,则定值电阻的阻值R0=___________Ω;电流表的内阻RA=___________Ω;电压表的内阻RV=___________Ω.(结果保留三位有效数字)


(2)为了进一步较精确测定电源的电动势和内阻,该同学从电表中选出一块电压表和一块电流表,结合其它器材,测出多组U和I的值,作出U―I图线,再由图线计算出电源的电动势和内阻。请设计出实验电路图,画在图乙中的方框内。
查看习题详情和答案>>某校两个课外活动小组分别用以下两种方法来验证机械能守恒定律.请阅读下列两段材料,完成后面问题.
第1小组:利用竖直上抛小球的频闪照片验证机械能守恒定律.图1所示所标数据为实际距离,t0时刻刚好对应抛出点,该小组同学通过计算得到不同时刻的速度和速度的平方值如下表,当他们要计算重力势能的改变量时,发现不知道当地重力加速度,请你根据实验数据,按照下列要求计算出重力加速度.

(1)在图2所给的坐标纸上作出v2-h图象:
(2)分析说明,图象斜率的绝对值表示的物理意义是: ;
(3)由图象求得的重力加速度是 m/s2(结果保留三位有效数字).
第2小组:DIS实验是利用现代信息技术进行的实验.“用DIS研究机械能守恒定律”的实验装置如图甲所示,小组同学在实验中利用小铁球从很光洁的曲面上滚下,选择DIS以图象方式显示实验的结果,所显示的图象如图乙所示.图象的横轴表示小球距d点(最低点)的高度h,纵轴表示小铁球的重力势能EP、动能Ek或机械能E.试回答下列问题:(1)图乙的图象中,表示小球的重力势能EP、动能Ek、机械能E随小球距d点的高度h变化关系的图线分别是 (按顺序填写相应图线所对应的文字);
(2)根据图乙所示的实验图象,可以得出的结论是: .
查看习题详情和答案>>
第1小组:利用竖直上抛小球的频闪照片验证机械能守恒定律.图1所示所标数据为实际距离,t0时刻刚好对应抛出点,该小组同学通过计算得到不同时刻的速度和速度的平方值如下表,当他们要计算重力势能的改变量时,发现不知道当地重力加速度,请你根据实验数据,按照下列要求计算出重力加速度.
| 时刻 | t1 | t2 | t3 | t4 | t5 |
| 速度 v(m/s) | 4.52 | 4.04 | 3.56 | 3.08 | 2.60 |
| V2(m2/s2) | 20.43 | 16.32 | 12.67 | 9.49 | 6.76 |
(2)分析说明,图象斜率的绝对值表示的物理意义是:
(3)由图象求得的重力加速度是
第2小组:DIS实验是利用现代信息技术进行的实验.“用DIS研究机械能守恒定律”的实验装置如图甲所示,小组同学在实验中利用小铁球从很光洁的曲面上滚下,选择DIS以图象方式显示实验的结果,所显示的图象如图乙所示.图象的横轴表示小球距d点(最低点)的高度h,纵轴表示小铁球的重力势能EP、动能Ek或机械能E.试回答下列问题:(1)图乙的图象中,表示小球的重力势能EP、动能Ek、机械能E随小球距d点的高度h变化关系的图线分别是
(2)根据图乙所示的实验图象,可以得出的结论是:
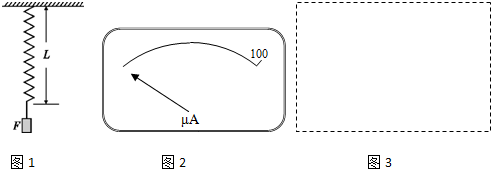
(1)某实验小组用如图1所示的装置测量弹簧的劲度系数k.当挂在弹簧下端的砝码处于静止状态时,测出弹簧受到的拉力F与对应的弹簧长度L(弹簧始终在弹性限度内),列表记录如下:
因为逐差法常用于处理自变量等间距变化的数据组,所以小组一成员用逐差法处理数据,具体如下:将表中第三列相邻的两项求差,得出弹簧伸长量△L=Li-Li-1每个△L都是与相同的拉力△F=0.49N相对应的伸长量,求出△L的平均值
=
=
=
cm=1.47cm故该弹簧的劲度系数为k=k=
=
=0.333N/cm该成员在实验数据处理中存在的问题是: ;请你用逐差法处理表格中的数据,尽量精确计算出弹簧的劲度系数k= N/cm(结果保留三位有效数字).
(2)一微安表 的刻度盘只标注了表示量程Ig=100μA的刻度线,尚未标注其他分刻度线,如图所2示.请用下列全部器材测量微安表
的刻度盘只标注了表示量程Ig=100μA的刻度线,尚未标注其他分刻度线,如图所2示.请用下列全部器材测量微安表 的内阻:
的内阻:
①图示的待测微安表 :内阻Rg约为2kΩ
:内阻Rg约为2kΩ
②1块毫伏表 :量程250mV,最小分度5mV,内阻约为1kΩ
:量程250mV,最小分度5mV,内阻约为1kΩ
③个滑动变阻器R1:0~50Ω
④个滑动变阻器R2:0~3kΩ
⑤1个直流电源E:电动势E=1.5V,内阻r约为1Ω
⑥1个单刀单掷开关S,导线若干
如图3所示,在方框内画出测量微安表 的内阻Rg的实验电路原理图(原理图中的元①要用相应的英文字母标注).
的内阻Rg的实验电路原理图(原理图中的元①要用相应的英文字母标注).
②下面是主要的实验操作步骤,将所缺的内容填写在横线上方:
第一步:断开S,按电路原理图连接器材,将两个滑动变阻器 R1、R2的触头分别置于合理的位置;
第二步:闭合S,分别调节R1和R2至适当位置,
③用已知量和测得量的符号表示微安表 的内阻Rg= .
的内阻Rg= .
查看习题详情和答案>>
| 实验次数i | Fi(N) | Li(cm) |
| 1 | 0.49 | 60.20 |
| 2 | 0.98 | 61.60 |
| 3 | 1.47 | 63.05 |
| 4 | 1.96 | 64.65 |
| 5 | 2.45 | 66.10 |
| 6 | 2.94 | 67.55 |
因为逐差法常用于处理自变量等间距变化的数据组,所以小组一成员用逐差法处理数据,具体如下:将表中第三列相邻的两项求差,得出弹簧伸长量△L=Li-Li-1每个△L都是与相同的拉力△F=0.49N相对应的伸长量,求出△L的平均值
. |
| △L |
| (L2-L1)+(L3-L2)+…(L6-L5) |
| 5 |
| L6-L5 |
| 5 |
| 67.55-60.20 |
| 5 |
| △F |
| △L |
| 0.49N |
| 1.47cm |
(2)一微安表
的刻度盘只标注了表示量程Ig=100μA的刻度线,尚未标注其他分刻度线,如图所2示.请用下列全部器材测量微安表的内阻:①图示的待测微安表
:内阻Rg约为2kΩ②1块毫伏表
:量程250mV,最小分度5mV,内阻约为1kΩ③个滑动变阻器R1:0~50Ω
④个滑动变阻器R2:0~3kΩ
⑤1个直流电源E:电动势E=1.5V,内阻r约为1Ω
⑥1个单刀单掷开关S,导线若干
如图3所示,在方框内画出测量微安表
的内阻Rg的实验电路原理图(原理图中的元①要用相应的英文字母标注).②下面是主要的实验操作步骤,将所缺的内容填写在横线上方:
第一步:断开S,按电路原理图连接器材,将两个滑动变阻器 R1、R2的触头分别置于合理的位置;
第二步:闭合S,分别调节R1和R2至适当位置,
③用已知量和测得量的符号表示微安表
的内阻Rg=(1)如图1所示实验装置可用来探究影响平行板电容器电容的因素,其中电容器左侧极板和静电计外壳接地,电容器右侧极板与静电计金属球相连.
①用摩擦过的玻璃棒或橡胶棒接触右侧极板使电容器带电.上移其中一极板,可观察到静电计指针偏转角 (选填“变大”、“变小”、“不变”,下同);当在两板间插入电介质时,静电计指针偏转角将 .
②关于本实验使用的静电计,以下说法正确的有
A.该静电计可以用电压表替代
B.该静电计可以用电流表替代
C.使用静电计的目的是观察电容器电压的变化情况
D.使用静电计的目的是观察电容器电量的变化情况
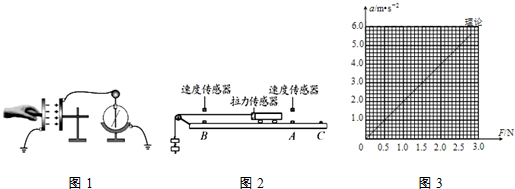
(2)图2为用拉力传感器和速度传感器探究“加速度与物体受力的关系”实验装置.用拉力传感器记录小车受到拉力的大小.在长木板上相距L=48.0cm的A、B两处各安装一个速度传感器,分别记录小车到达A、B时的速率.
①实验主要步骤如下:
A.将拉力传感器固定在小车上;
B.调整长木板的倾斜角度,以平衡小车受到的摩擦力,让小车在不受拉力作用时能在木板上做 运动;
C.把细线的一端固定在拉力传感器上,另一端通过定滑轮与钩码相连;
D.接通电源后自C点释放小车,小车在细线拉动下运动,记录细线拉力F的大小及小车分别到达A、B时的速率vA、vB;
E.改变所挂钩码的数量,重复步骤D的操作.
②表中记录了实验测得的几组数据,
-
是两个速度传感器记录速率的平方差,则加速度的表达式a= ,请将表中第3次的实验数据填写完整(保留三位有效数字);
③由表中数据在坐标纸上描点并作出a~F关系图线;
④对比实验结果与理论计算得到的关系图线(图3中已画出理论图线),造成上述偏差的原因是 .
查看习题详情和答案>>
①用摩擦过的玻璃棒或橡胶棒接触右侧极板使电容器带电.上移其中一极板,可观察到静电计指针偏转角
②关于本实验使用的静电计,以下说法正确的有
A.该静电计可以用电压表替代
B.该静电计可以用电流表替代
C.使用静电计的目的是观察电容器电压的变化情况
D.使用静电计的目的是观察电容器电量的变化情况
(2)图2为用拉力传感器和速度传感器探究“加速度与物体受力的关系”实验装置.用拉力传感器记录小车受到拉力的大小.在长木板上相距L=48.0cm的A、B两处各安装一个速度传感器,分别记录小车到达A、B时的速率.
①实验主要步骤如下:
A.将拉力传感器固定在小车上;
B.调整长木板的倾斜角度,以平衡小车受到的摩擦力,让小车在不受拉力作用时能在木板上做
C.把细线的一端固定在拉力传感器上,另一端通过定滑轮与钩码相连;
D.接通电源后自C点释放小车,小车在细线拉动下运动,记录细线拉力F的大小及小车分别到达A、B时的速率vA、vB;
E.改变所挂钩码的数量,重复步骤D的操作.
| 次数 | F(N) |
|
a(m/s2) | ||||
| 1 | 0.60 | 0.77 | 0.80 | ||||
| 2 | 1.04 | 1.61 | 1.68 | ||||
| 3 | 1.42 | 2.34 | |||||
| 4 | 2.00 | 3.48 | 3.63 | ||||
| 5 | 2.62 | 4.65 | 4.84 | ||||
| 6 | 3.00 | 5.49 | 5.72 |
| v | 2 B |
| v | 2 A |
③由表中数据在坐标纸上描点并作出a~F关系图线;
④对比实验结果与理论计算得到的关系图线(图3中已画出理论图线),造成上述偏差的原因是
用如图1所示的实验装置验证牛顿第二定律.

①完成平衡摩擦力的相关内容:
(i)取下砂桶,把木板不带滑轮的一端垫高,接通打点计时器电源, (选填“静止释放”或“轻轻推动”)小车,让小车拖着纸带运动.
(ii)如果打出的纸带如图2所示,则应 (选填“增大”或“减小”)木板的倾角,反复调节,直到纸带上打出的点迹 ,平衡摩擦力才完成.
②如图3所示是某次实验中得到的一条纸带,其中A、B、C、D、E是计数点(每打5个点取一个计数点),其中L1=3.07cm,L2=12.38cm,L3=27.87cm,L4=49.62cm.则打C点时小车的速度为 m/s,小车的加速度是 m/s2.(计算结果均保留三位有效数字)
查看习题详情和答案>>
①完成平衡摩擦力的相关内容:
(i)取下砂桶,把木板不带滑轮的一端垫高,接通打点计时器电源,
(ii)如果打出的纸带如图2所示,则应
②如图3所示是某次实验中得到的一条纸带,其中A、B、C、D、E是计数点(每打5个点取一个计数点),其中L1=3.07cm,L2=12.38cm,L3=27.87cm,L4=49.62cm.则打C点时小车的速度为