
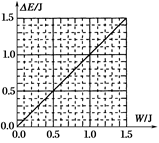
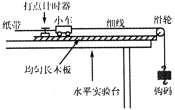
 数据如表中所示,根据表中数据,为直观反映F不变时a与m的关系,请在方格坐标纸中选择恰当物理量建立坐标系,并作出图线;从图线中得到F不变时小车加速度a与质量m间定量关系是________。
数据如表中所示,根据表中数据,为直观反映F不变时a与m的关系,请在方格坐标纸中选择恰当物理量建立坐标系,并作出图线;从图线中得到F不变时小车加速度a与质量m间定量关系是________。


某实验小组利用拉力传感器和速度传感器探究“动能定理”.如图,他们将拉力传感器固定在小车上,用不可伸长的细线将其通过一个定滑轮与钩码相连,用拉力传感器记录小车受到拉力的大小.在水平桌面上相距50.0 cm的A、B两点各安装一个速度传感器,记录小车通过A、B时的速度大小.小车中可以放置砝码.
(1)实验主要步骤如下:
①测量小车和拉力传感器的总质量M′;把细线的一端固定在拉力传感器上,另一端通过定滑轮与钩码相连;正确连接所需电路;
②将小车停在C点,释放小车,小车在细线拉动下运动,记录细线拉力及小车通过A、B时的速度.
③在小车中增加砝码,或________,重复②的操作.
(2)下表是他们测得的一组数据,其中M是M′与小车中砝码质量之和,| -v12|是两个速度传感器记录速度的平方差,可以据此计算出动能变化量ΔE,F是拉力传感器受到的拉力,W是F在A、B间所做的功.表格中的ΔE3=________,W3=________.(结果保留三位有效数字)
-v12|是两个速度传感器记录速度的平方差,可以据此计算出动能变化量ΔE,F是拉力传感器受到的拉力,W是F在A、B间所做的功.表格中的ΔE3=________,W3=________.(结果保留三位有效数字)
| 次数 | M/kg | |-v12|/(m/s)2 | ΔE/J | F/N | W/J |
| 1 | 0.500 | 0.760 | 0.190 | 0.400 | 0.200 |
| 2 | 0.500 | 1.65 | 0.413 | 0.840 | 0.420 |
| 3 | 0.500 | 2.40 | ΔE3 | 1.220 | W3 |
| 4 | 1.000 | 2.40 | 1.20 | 2.420 | 1.21 |
| 5 | 1.000 | 2.84 | 1.42 | 2.860 | 1.43 |

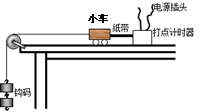
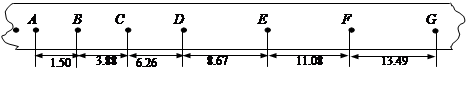
用如图实验装置验证m1、m2组成的系统机械能守恒.m2从高处由静止开始下落,m1上拖着的纸带打出一系列的点,对纸带上的点迹进行测量,即可验证机械能守恒定律.如图给出的是实验中获取的一条纸带:0是打下的第一个点,每相邻两计数点间还有4个点(图中未标出),计数点间的距离如图所示.已知m1=50 g、m2=150 g,则(g取10 m/s2,结果保留两位有效数字)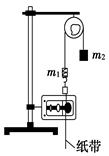
(1)下面列举了该实验的几个操作步骤:
| A.按照图所示的装置安装器件; |
| B.将打点计时器接到直流电源上; |
| C.先释放m2,再接通电源打出一条纸带; |
| D.测量纸带上某些点间的距离; |
其中操作不当的步骤是__________(填选项对应的字母).
(2)在打点0~5过程中系统动能的增量ΔEk=__________J,系统势能的减少量ΔEp=0.60J,由此得出的结论是_________________________________;
(3)若某同学作出
 v2-h图象,可以计算当地重力加速度g,请写出计算g的表达式____________.(用字母表示)
v2-h图象,可以计算当地重力加速度g,请写出计算g的表达式____________.(用字母表示)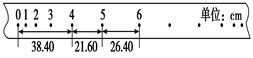


 B.W∝
B.W∝ C.W∝v2 D.W∝v3
C.W∝v2 D.W∝v3(8分)某实验小组设计了如图(a)所示的实验装置,用钩码所受重力作为小车所受的拉力,用DIS测小车的加速度。通过改变钩码的数量,多次重复测量,可得小车运动的加速度a和所受拉力F的关系图象。他们在轨道水平和倾斜的两种情况下分别做了实验,得到了两条a-F图线,如图(b)所示。
(1)图线______是在轨道右侧抬高成为斜面情况下得到的;(选填“①”或“②”)
(2)随着钩码的数量增大到一定程度时图(b)中的图线明显偏离直线,造成此误差的主要原因是所挂钩码的总质量太大,为消除此误差可采取的简便且有效的措施是 _____________
| A.调整轨道的倾角,在未挂钩码时使小车能在轨道上长时间缓慢运动(即将小车与传感器发射部分的重力沿轨道方向的分力恰与其所受摩擦力平衡) |
| B.在增加钩码数量进行实验的同时在小车上增加砝码,使钩码的总质量始终远小于小车与传感器发射部分的总质量 |
| C.在钩码与细绳之间放置一力传感器,直接得到小车运动的加速度a和力传感器读数F的关系图象 |
| D.更换实验中使用的钩码规格,采用质量较小的钩码进行上述实验 |