一弹簧振子沿水平方向的x轴做简谐运动,原点O为平衡位置,取x轴正方向为矢量的正方向,在振动中某一时刻有可能出现的情况是( )
A.位移与速度均为正值,加速度为负值 B.位移为负值,加速度为正值
C.位移与加速度均为正值,速度为负值 D.位移、速度、加速度均为负值
一火箭喷气发动机每次喷出m=2000g的气体,喷出气体相对地面速度v=100 m/s。若此火箭初始总质量M=300kg,发动机每秒喷气20次,不考虑地球引力及空气阻力的情况下,火箭发动机1s末的速度是多大?
若已知行星绕太阳公转的半径为r,公转的周期为T,万有引力恒量为G,用已知物理量表示太阳的质量M。
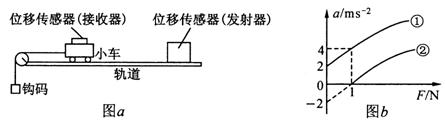
某实验小组设计了如图 a所示的实验装置,用钩码所受重力作为小车所受的拉力,用DIS测小车的加速度.通过改变钩码的数量,多次重复测量,可得小车运动的加速度a和所受拉力 F的关系图像.他们在轨道水平和倾斜的两种情况下分别做实验,得到了两条 a-F图线,如图 b所示.
(1)图线 是在轨道右侧抬高成为斜面情况下得到的.(选填“①”或“②”)
(2)随着钩码的数量增大到一定程度时图 b中的图线明显偏离直线,造成此误差的主要原因是所挂钩码的总质量太大,为消除此误差可采取的最为简便且有效的措施是
A.调整轨道的倾角,在未挂钩码时使小车能在轨道上长时间缓慢运动(即小车与传感器发射部分的重力沿轨道方向的分力恰与其所受摩擦力平衡)
B.在增加钩码数量进行实验的同时在小车上增加砝码,使钩码的总质量始终远小于小车与传感器接收部分的总质量
C.在钩码与细绳之间放置一力传感器,直接得到小车运动的加速度 a和力传感器读数F的关系图像
D.更换实验中使用的钩码规格,采用质量较小的钩码进行上述实验
(3)测得小车和位移传感器接收部分的总质量m= kg;滑块和轨道间的动摩擦因数μ= .
下列说法正确的是
A.物体做匀速运动,它的机械能一定守恒
B.物体所受合外力的功为零,它的机械能一定守恒
C.物体所受的合外力等于零,它的机械能一定守恒
D.物体所受合外力不等于零,它的机械能可能守恒
木块放在光滑的水平面上,子弹以速度V0射入木块,子弹可能穿出(如C、D),也可能不穿出(如A、B),如图所示。下列哪几组能反映(刚相对静止或刚穿出时)可能发生的情况
物体沿直线运动的v-t关系如图所示,已知在第1s内合外力对物体做的功为W,则( )
A.从第1s末到第3s末合外力做功为4W
B.从第3s末到第5s末合外力做功为-2W
C.从第5s末到第7s末秒末合外力做功为-W
D.从第3s末到第4s末合外力做功为-0.75W
如图所示,分别在M、N两点固定放置两个点电荷+Q和-q (Q>q) ,以MN连线的中点O为圆心的圆周上有四点A、B、C、D,关于这四点的场强和电势,下列说法中正确的是
A.A点电势高于B点电势
B.A点场强小于B点场强
C.C点电势低于D点电势
D.C点场强大于D点场强
一物体在运动过程中,重力做了-2J的功,则( )
A.该物体重力势能减少,减少量等于2J B.该物体重力势能减少,减少量大于2J
C.该物体重力势能增加,增加量小于2J D.该物体重力势能增加,增加量等于2J
两个质量均为m的可视为质点的小球,相距为d时的相互作用力为F;现将两球的质量和距离都变为原来的2倍,则它们之间的相互作用力大小将变为
A.F B.F C.2F D.4F