0 23168 23176 23182 23186 23192 23194 23198 23204 23206 23212 23218 23222 23224 23228 23234 23236 23242 23246 23248 23252 23254 23258 23260 23262 23263 23264 23266 23267 23268 23270 23272 23276 23278 23282 23284 23288 23294 23296 23302 23306 23308 23312 23318 23324 23326 23332 23336 23338 23344 23348 23354 23362 176998

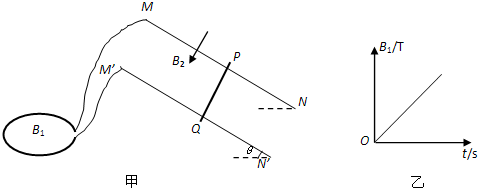 如图甲所示,水平面上有一个多匝圆形线圈,通过导线与倾斜导轨上端相连,线圈内存在随时间均匀增大的匀强磁场,磁场沿竖直方向,其磁感应强度B1随时间变化图象如图乙所示.倾斜平行光滑金属导轨MN、M′N′相距l,导轨平面与水平面夹角为θ,并处于磁感应强度大小为B2、方向垂直导轨平面向下的匀强磁场中;一导体棒PQ垂直于导轨放置,且始终保持静止.
如图甲所示,水平面上有一个多匝圆形线圈,通过导线与倾斜导轨上端相连,线圈内存在随时间均匀增大的匀强磁场,磁场沿竖直方向,其磁感应强度B1随时间变化图象如图乙所示.倾斜平行光滑金属导轨MN、M′N′相距l,导轨平面与水平面夹角为θ,并处于磁感应强度大小为B2、方向垂直导轨平面向下的匀强磁场中;一导体棒PQ垂直于导轨放置,且始终保持静止.

 (2013?潮州二模)空间虚线上方存在匀强磁场,磁感应强度为B;一群电子以不同速率v从边界上的P点以相同的方向射入磁场.其中某一速率v0的电子从Q点射出,如图所示.已知电子入射方向与边界夹角为θ,则由以上条件可判断( )
(2013?潮州二模)空间虚线上方存在匀强磁场,磁感应强度为B;一群电子以不同速率v从边界上的P点以相同的方向射入磁场.其中某一速率v0的电子从Q点射出,如图所示.已知电子入射方向与边界夹角为θ,则由以上条件可判断( ) (2013?潮州二模)甲和乙两个物体在同一直线上运动,它们的v-t图象如图所示,则在t1时刻( )
(2013?潮州二模)甲和乙两个物体在同一直线上运动,它们的v-t图象如图所示,则在t1时刻( )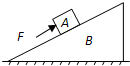 如图所示,物体A放置在固定斜面上,一平行斜面向上的力F作用于物体A上.在力F变大的过程中,A始终保持静止,则以下说法中正确的是( )
如图所示,物体A放置在固定斜面上,一平行斜面向上的力F作用于物体A上.在力F变大的过程中,A始终保持静止,则以下说法中正确的是( )