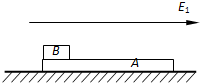
 如图所示,A是一个质量为1×10-3kg表面绝缘的薄板,薄板静止在光滑的水平面上,在薄板左端放置一质量为1×10-3kg带电量为q=1×10-5C的绝缘物块,在薄板上方有一水平电场,可以通过外接装置控制其大小及方向.接通装置先产生一个方向水平向右,大小E1=5×102V/m的电场,薄板和物块开始运动,作用时间2s后,改变电场,电场大小变为E2=1×102V/m,方向向左,电场作用一段时间后,关闭电场,薄板正好到达目的地,且薄板和物块的速度都恰好为零.已知薄板与物块间的动摩擦因数μ=0.1,(薄板不带电,物块体积大小不计,g取10m/s2)求:
如图所示,A是一个质量为1×10-3kg表面绝缘的薄板,薄板静止在光滑的水平面上,在薄板左端放置一质量为1×10-3kg带电量为q=1×10-5C的绝缘物块,在薄板上方有一水平电场,可以通过外接装置控制其大小及方向.接通装置先产生一个方向水平向右,大小E1=5×102V/m的电场,薄板和物块开始运动,作用时间2s后,改变电场,电场大小变为E2=1×102V/m,方向向左,电场作用一段时间后,关闭电场,薄板正好到达目的地,且薄板和物块的速度都恰好为零.已知薄板与物块间的动摩擦因数μ=0.1,(薄板不带电,物块体积大小不计,g取10m/s2)求:
20.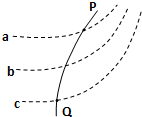 如图所示,虚线a、b、c代表电场中的三个等势面,相邻等势面之间的电势差相等,即Uab=Ubc,实线为一带正电的质点仅在电场力作用下通过该区域时的运动轨迹,P、Q是这条轨迹上的两点,据此可知以下说法中不正确的是( )
如图所示,虚线a、b、c代表电场中的三个等势面,相邻等势面之间的电势差相等,即Uab=Ubc,实线为一带正电的质点仅在电场力作用下通过该区域时的运动轨迹,P、Q是这条轨迹上的两点,据此可知以下说法中不正确的是( )
如图所示,虚线a、b、c代表电场中的三个等势面,相邻等势面之间的电势差相等,即Uab=Ubc,实线为一带正电的质点仅在电场力作用下通过该区域时的运动轨迹,P、Q是这条轨迹上的两点,据此可知以下说法中不正确的是( )| A. | 三个等势面中,a的电势最低 | |
| B. | 带电质点通过P点时的电势能比Q点大 | |
| C. | 带电质点通过P点时的动能比Q点大 | |
| D. | 带电质点通过P点时的加速度比Q点大 |
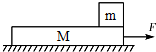 如图所示有一块长为1m的薄木板静止水平地面上,薄木板质量为4㎏,其与地面间的动摩擦因数μ0为0.5,薄木板右端放一质量1kg为小滑块,大小可忽略不计,小滑块与薄木板之间的动摩擦因数为μ1为0.4,小滑块与地面之间的动摩擦因数为μ2为0.2.
如图所示有一块长为1m的薄木板静止水平地面上,薄木板质量为4㎏,其与地面间的动摩擦因数μ0为0.5,薄木板右端放一质量1kg为小滑块,大小可忽略不计,小滑块与薄木板之间的动摩擦因数为μ1为0.4,小滑块与地面之间的动摩擦因数为μ2为0.2.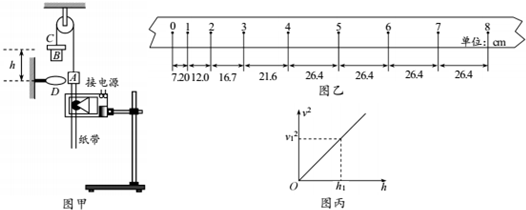
16. 某静电场中的电场线为图示实线,带电粒子仅受电场力作用由M点运动到N点,其运动轨迹如图中虚线所示,以下说法正确的是( )
某静电场中的电场线为图示实线,带电粒子仅受电场力作用由M点运动到N点,其运动轨迹如图中虚线所示,以下说法正确的是( )
某静电场中的电场线为图示实线,带电粒子仅受电场力作用由M点运动到N点,其运动轨迹如图中虚线所示,以下说法正确的是( )| A. | 粒子带正电荷 | |
| B. | 由于M点没有电场线,粒子在M点不受电场力的作用 | |
| C. | 粒子在M点的加速度小于它在N点的加速度 | |
| D. | 粒子在M点的动能小于在N点的动能 |
15.如图1为探究“加速度与物体受力的关系”的实验装置,在长木板上相距L=48.0m的A、B两点各安装一个速度传感器,分别记录小车到达A、B时的速率.小车受到拉力的大小用拉力传感器记录:
(1)实验主要步骤如下:
①将拉力传感器固定在小车上;
②调整长木板的倾斜角度,以平衡小车受到的摩擦力,让小车在不受拉力作用时能在木板上做匀速直线运动;
③把细线的一端固定在拉力传感器上,另一端通过定滑轮与钩码相连;
④接通电源后自C点释放小车,小车在细线拉动下运动,记录细线拉力F的大小及小车分别到达A、B时的速度率vA、vB;
⑤改变所挂钩码的数量,重复④的操作.
(2)下表记录了实验测得的几组数据,△v2是两个速度传感器记录速率的平方差,则加速度的表达式a=$\frac{{{v}_{B}}^{2}-{{v}_{A}}^{2}}{2L}$,请将表中第3次的实验数据填写完整(结果保留三位有效数字).
(3)由表中数据在所示的坐标纸上攒点并作出a~F关系图线;
(4)对比实验结果与理论计算得到的关系图线(图2中已画出理论图线),造成上述偏差的原因是没有完全平衡摩擦力或拉力传感器读数偏大.

(1)实验主要步骤如下:
①将拉力传感器固定在小车上;
②调整长木板的倾斜角度,以平衡小车受到的摩擦力,让小车在不受拉力作用时能在木板上做匀速直线运动;
③把细线的一端固定在拉力传感器上,另一端通过定滑轮与钩码相连;
④接通电源后自C点释放小车,小车在细线拉动下运动,记录细线拉力F的大小及小车分别到达A、B时的速度率vA、vB;
⑤改变所挂钩码的数量,重复④的操作.
(2)下表记录了实验测得的几组数据,△v2是两个速度传感器记录速率的平方差,则加速度的表达式a=$\frac{{{v}_{B}}^{2}-{{v}_{A}}^{2}}{2L}$,请将表中第3次的实验数据填写完整(结果保留三位有效数字).
| 次数 | F(N) | △v2($\frac{{m}^{2}}{{s}^{2}}$) | a(m/s2) |
| 1 | 0.60 | 0.77 | 0.80 |
| 2 | 1.04 | 1.61 | 1.68 |
| 3 | 1.42 | 2.34 | |
| 4 | 2.00 | 3.48 | 3.63 |
| 5 | 2.62 | 4.65 | 4.84 |
| 6 | 3.00 | 5.49 | 5.72 |
(4)对比实验结果与理论计算得到的关系图线(图2中已画出理论图线),造成上述偏差的原因是没有完全平衡摩擦力或拉力传感器读数偏大.
13.为了探究受到空气阻力时,物体运动速度随时间的变化规律,某同学采用了“加速度与物体质量、物体受力关系”的实验装置(如图甲所示).实验室,平衡小车与木板之间的摩擦力后,在小车上安装一薄板,以增大空气对小车运动的阻力.

(1)往砝码盘中加入一小砝码,在释放小车前(选填“前”或“后”)接通打点计时器的电,在纸带上打出一系列的点.
(2)从纸带上选取若干计数点进行测量,得出各计数点的时间t与速度v的数据如上表:
请根据实验数据作出小车的v-t图象乙.
(3)通过分析,你能得出的结论是:在v-t图象中,速度越大时,加速度越小,小车受到的合力越小,则小车受空气阻力越大.
(1)往砝码盘中加入一小砝码,在释放小车前(选填“前”或“后”)接通打点计时器的电,在纸带上打出一系列的点.
(2)从纸带上选取若干计数点进行测量,得出各计数点的时间t与速度v的数据如上表:
请根据实验数据作出小车的v-t图象乙.
| 时间t/s | 0 | 0.50 | 1.00 | 1.50 | 2.00 | 2.50 |
| 速度v(m/s) | 0.12 | 0.19 | 0.23 | 0.26 | 0.28 | 0.29 |
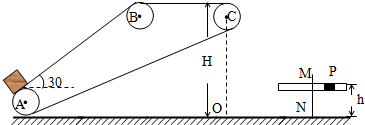
12. 某同学利用如图a所示的实验装置验证机械能守恒定律,倾角θ=37°的轨道末端有一段很短的光滑小圆弧,可使小滑块从高地H的高度处水平飞出,将滑块从轨道的不同高度h静止释放,测出相应的滑块落点距轨道末端的水平距离s.
某同学利用如图a所示的实验装置验证机械能守恒定律,倾角θ=37°的轨道末端有一段很短的光滑小圆弧,可使小滑块从高地H的高度处水平飞出,将滑块从轨道的不同高度h静止释放,测出相应的滑块落点距轨道末端的水平距离s.
(1)若轨道完全光滑,s2与h的理论关系应满足s2=4Hh(用H、h表示).该同学根据理论值在图b中做出了s2-h关系图象.
(2)该同学实验测量得到一组数据,如表所示,请在图b的坐标上做出实验所得的s2-h关系图
(3)该同学通过分析确定,是由于轨道不光滑造成了实验得到的图象与理论图象有较大的差异,请根据两个图象算出倾斜轨道与滑块间的动摩擦因数u=0.26.
(4)若实验中轨道末端的光滑小圆弧右端不水平且偏低,则通过计算得到的滑块落地速率小于实际速率(填“大于”、“等于”或“小于”).
0 148716 148724 148730 148734 148740 148742 148746 148752 148754 148760 148766 148770 148772 148776 148782 148784 148790 148794 148796 148800 148802 148806 148808 148810 148811 148812 148814 148815 148816 148818 148820 148824 148826 148830 148832 148836 148842 148844 148850 148854 148856 148860 148866 148872 148874 148880 148884 148886 148892 148896 148902 148910 176998
某同学利用如图a所示的实验装置验证机械能守恒定律,倾角θ=37°的轨道末端有一段很短的光滑小圆弧,可使小滑块从高地H的高度处水平飞出,将滑块从轨道的不同高度h静止释放,测出相应的滑块落点距轨道末端的水平距离s.(1)若轨道完全光滑,s2与h的理论关系应满足s2=4Hh(用H、h表示).该同学根据理论值在图b中做出了s2-h关系图象.
(2)该同学实验测量得到一组数据,如表所示,请在图b的坐标上做出实验所得的s2-h关系图
| H(10-1m) | 2.00 | 3.00 | 4.00 | 5.00 | 6.00 |
| s2(10-1m2) | 2.60 | 3.90 | 5.20 | 6.50 | 7.80 |
(4)若实验中轨道末端的光滑小圆弧右端不水平且偏低,则通过计算得到的滑块落地速率小于实际速率(填“大于”、“等于”或“小于”).