13.质点从t=0时刻开始作直线运动的v-t图象如图所示,则( )
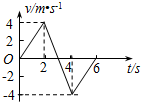
| A. | 6s内物体做匀变速直线运动 | B. | 前3s内的平均速度为2m/s | ||
| C. | 2s末物体离出发点最远 | D. | 前5s内物体的位移大小等于路程 |
11.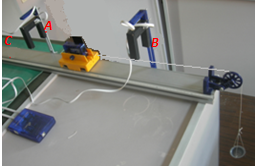 某实验小组利用力传感器和光电门传感器探究“动能定理”.将力传感器固定在小车上,用不可伸长的细线通过一个定滑轮与重物G相连,力传感器记录小车受到拉力的大小.在水平轨道上A、B两点各固定一个光电门传感器,用于测量小车的速度v1和v2,如图所示.在小车上放置砝码来改变小车质量,用不同的重物G来改变拉力的大小,摩擦力不计.
某实验小组利用力传感器和光电门传感器探究“动能定理”.将力传感器固定在小车上,用不可伸长的细线通过一个定滑轮与重物G相连,力传感器记录小车受到拉力的大小.在水平轨道上A、B两点各固定一个光电门传感器,用于测量小车的速度v1和v2,如图所示.在小车上放置砝码来改变小车质量,用不同的重物G来改变拉力的大小,摩擦力不计.
(1)实验主要步骤如下:
①测量小车和拉力传感器的总质量M1,把细线的一端固定在力传感器上,另一端通过定滑轮与重物G相连,正确连接所需电路;
②将小车停在点C,由静止开始释放小车,小车在细线拉动下运动,除了光电门传感器测量速度和力传感器测量拉力的数据以外,还应该记录的物理量为两光电门间的距离L;
③改变小车的质量或重物的质量,重复②的操作.
(2)表格中M是M1与小车中砝码质量之和,△E为动能变化量,F是拉力传感器的拉力,W是F在A、B间所做的功.表中的△E3=0.600,W3=0.610(结果保留三位有效数字).
某实验小组利用力传感器和光电门传感器探究“动能定理”.将力传感器固定在小车上,用不可伸长的细线通过一个定滑轮与重物G相连,力传感器记录小车受到拉力的大小.在水平轨道上A、B两点各固定一个光电门传感器,用于测量小车的速度v1和v2,如图所示.在小车上放置砝码来改变小车质量,用不同的重物G来改变拉力的大小,摩擦力不计.(1)实验主要步骤如下:
①测量小车和拉力传感器的总质量M1,把细线的一端固定在力传感器上,另一端通过定滑轮与重物G相连,正确连接所需电路;
②将小车停在点C,由静止开始释放小车,小车在细线拉动下运动,除了光电门传感器测量速度和力传感器测量拉力的数据以外,还应该记录的物理量为两光电门间的距离L;
③改变小车的质量或重物的质量,重复②的操作.
(2)表格中M是M1与小车中砝码质量之和,△E为动能变化量,F是拉力传感器的拉力,W是F在A、B间所做的功.表中的△E3=0.600,W3=0.610(结果保留三位有效数字).
| 次数 | M/kg | |v22-v12|/m2s-2 | △E/J | F/N | W/J |
| 1 | 0.500 | 0.760 | 0.190 | 0.400 | 0.200 |
| 2 | 0.500 | 1.65 | 0.413 | 0.840 | 0.420 |
| 3 | 0.500 | 2.40 | △E3 | 1.22 | W3 |
| 4 | 1.00 | 2.40 | 1.20 | 2.42 | 1.21 |
| 5 | 1.00 | 2.84 | 1.42 | 2.86 | 1.43 |
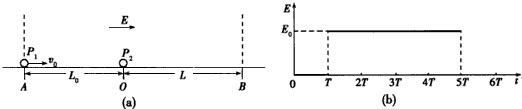
 如图,长为l的导体棒ab原来不带电,现将一带电量为q的点电荷放在距棒a端R处,当达到静电平衡后,棒上感应电荷在棒内距b端$\frac{1}{3}$处产生的场强大小为$K\frac{q}{(R+\frac{2}{3}L)^{2}}$,方向为点电荷q在该处产生的电场强度的方向相反;若棒内一自由电子从a端运动到b端,电场力所做功为0.
如图,长为l的导体棒ab原来不带电,现将一带电量为q的点电荷放在距棒a端R处,当达到静电平衡后,棒上感应电荷在棒内距b端$\frac{1}{3}$处产生的场强大小为$K\frac{q}{(R+\frac{2}{3}L)^{2}}$,方向为点电荷q在该处产生的电场强度的方向相反;若棒内一自由电子从a端运动到b端,电场力所做功为0.
8.如图所示,甲、乙两个物体分别从A点经①、②路径运动到B点,在此过程中甲、乙一定具有相同的( )
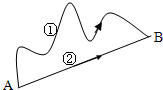
| A. | 时间 | B. | 路程 | C. | 位移 | D. | 平均速度 |
7.对于做变速直线运动的物体,有下列几句话,叙述中表示瞬时速度的是( )
| A. | 物体在第2s内的速度是4m/s | |
| B. | 物体在第3s未的速度是4m/s | |
| C. | 物体在通过某一点的速度是8m/s | |
| D. | 物体在通过某一段位移时的速度是8m/s |
6. 如图所示,电梯与水平地面成θ角,一人站在电梯上,电梯从静止开始匀加速向下运动,达到一定速度后再匀速向下运动.若以N表示水平梯板对人的支持力,G为人受到的重力,f为电梯对人的静摩擦力,下列结论正确的是( )
如图所示,电梯与水平地面成θ角,一人站在电梯上,电梯从静止开始匀加速向下运动,达到一定速度后再匀速向下运动.若以N表示水平梯板对人的支持力,G为人受到的重力,f为电梯对人的静摩擦力,下列结论正确的是( )
0 146808 146816 146822 146826 146832 146834 146838 146844 146846 146852 146858 146862 146864 146868 146874 146876 146882 146886 146888 146892 146894 146898 146900 146902 146903 146904 146906 146907 146908 146910 146912 146916 146918 146922 146924 146928 146934 146936 146942 146946 146948 146952 146958 146964 146966 146972 146976 146978 146984 146988 146994 147002 176998
如图所示,电梯与水平地面成θ角,一人站在电梯上,电梯从静止开始匀加速向下运动,达到一定速度后再匀速向下运动.若以N表示水平梯板对人的支持力,G为人受到的重力,f为电梯对人的静摩擦力,下列结论正确的是( )| A. | 加速过程中合外力对人做正功 | B. | 加速过程中G对人做负功 | ||
| C. | 匀速过程中N对人不做功 | D. | 匀速过程中f对人做正功 |