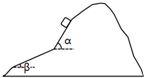
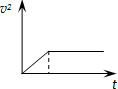
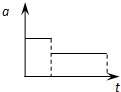
 2015年4月25日14时11分在尼泊尔发生里氏8.1级地震,震源深度20千米,地震后造成珠穆朗玛峰发生雪崩,珠峰南坡登山大本营被埋.假设珠峰南坡发生雪崩的一处山坡由两个倾角不同的斜面连接而成,在斜面连接处忽略积雪的动能损失.雪崩时,积雪由静止开始下滑,积雪与两个斜面之间的动摩擦因数均为μ=$\frac{\sqrt{3}}{3}$,两个斜面倾角分别为α=53°,β=30°.下图中,v、a、s、t、E、Ek分别表示积雪速度大小、加速度大小、路程、时间、机械能和动能,下图中可能正确的是( )
2015年4月25日14时11分在尼泊尔发生里氏8.1级地震,震源深度20千米,地震后造成珠穆朗玛峰发生雪崩,珠峰南坡登山大本营被埋.假设珠峰南坡发生雪崩的一处山坡由两个倾角不同的斜面连接而成,在斜面连接处忽略积雪的动能损失.雪崩时,积雪由静止开始下滑,积雪与两个斜面之间的动摩擦因数均为μ=$\frac{\sqrt{3}}{3}$,两个斜面倾角分别为α=53°,β=30°.下图中,v、a、s、t、E、Ek分别表示积雪速度大小、加速度大小、路程、时间、机械能和动能,下图中可能正确的是( )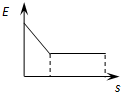

8.通过一阻值R=1Ω的电阻的交变电流如图所示,其周期为1s,电阻两端电压的有效值约为( )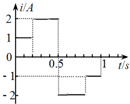
| A. | 1.5V | B. | 1.7V | C. | 1V | D. | 1.4V |
7.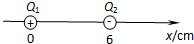 如图,真空中有两个点电荷Q1=+4.0×10-8C和Q2=-1.0×10-8C,分别固定在x坐标轴的x=0和x=6cm的位置上.以下说法中正确的是( )
如图,真空中有两个点电荷Q1=+4.0×10-8C和Q2=-1.0×10-8C,分别固定在x坐标轴的x=0和x=6cm的位置上.以下说法中正确的是( )
如图,真空中有两个点电荷Q1=+4.0×10-8C和Q2=-1.0×10-8C,分别固定在x坐标轴的x=0和x=6cm的位置上.以下说法中正确的是( )| A. | x=12cm处电场强度为0 | |
| B. | x=4cm处电场强度为0 | |
| C. | x=8cm处电场强度方向沿着x轴正向 | |
| D. | x=16cm处电场强度方向沿着沿着x轴负向 |
6.2015年1月2日13时许,哈尔滨市道外区太古街与南勋街合围地段一仓库起火,经过消防官兵和群众的合力营救,连续着了10个小时的大火终于被扑灭.设消防水龙头斜向上喷出的水恰好水平击中着火点,楼高7.2米,消防员与楼体距离为24米,则水流喷出的速度最接近(忽略水龙头离地高度及一切阻力,取g=10m/s2)( )
| A. | 12.6m/s | B. | 20m/s | C. | 23.3m/s | D. | 12m/s |
5.下列说法中正确的是( )
| A. | 根据狭义相对论物体运动质量和静止质量的关系m=$\frac{{m}_{0}}{\sqrt{1-\frac{{v}^{2}}{{c}^{2}}}}$,可以得出物体的速度可能达到光速 | |
| B. | 考虑到各种综合因素,远距离输电,输电电压越高越好 | |
| C. | 野外高压输电线在三条输电线的上方还有两条导线,它们与大地相连,形成一个稀疏的金属“网”,把高压线屏蔽起来,免遭雷击 | |
| D. | 电容器外壳上标的是额定电压,也是该电容的击穿电压 |


 如图所示,水平虚线L1、L2之间是匀强磁场,磁场方向水平向里,磁场区域的高度为h.竖直平面内有一质量为m 的直角梯形线框,底边水平,其上下边长之比为5:1,高为2h.现使线框AB边在磁场边界L1的上方h高处由静止自由下落(下落过程底边始终水平,线框平面始终与磁场方向垂直),当AB边刚进入磁场时加速度恰好为0,在DC边刚进入磁场前的一段时间内,线框做匀速运动.求:
如图所示,水平虚线L1、L2之间是匀强磁场,磁场方向水平向里,磁场区域的高度为h.竖直平面内有一质量为m 的直角梯形线框,底边水平,其上下边长之比为5:1,高为2h.现使线框AB边在磁场边界L1的上方h高处由静止自由下落(下落过程底边始终水平,线框平面始终与磁场方向垂直),当AB边刚进入磁场时加速度恰好为0,在DC边刚进入磁场前的一段时间内,线框做匀速运动.求:
20.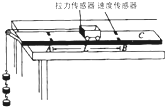 某实验小组利用拉力传感器和速度传感器探究“功与动能变化的关系”.实验装置如图所示,他们将拉力传感器固定在小车上,用不可伸长的细线将其通过一个定滑轮与钩码相连,用拉力传感器记录小车受到拉力的大小.水平桌面上相距L的A、B两点各安装一个速度传感器,记录小车通过A、B时的速度大小.小车中可以放置砝码.
某实验小组利用拉力传感器和速度传感器探究“功与动能变化的关系”.实验装置如图所示,他们将拉力传感器固定在小车上,用不可伸长的细线将其通过一个定滑轮与钩码相连,用拉力传感器记录小车受到拉力的大小.水平桌面上相距L的A、B两点各安装一个速度传感器,记录小车通过A、B时的速度大小.小车中可以放置砝码.
(1)实验主要步骤如下:
①测量小车、砝码和拉力传感器的总质量M;把细线的一端固定在拉力传感器上,另一端通过定滑轮与钩码相连;正确连接所需电路;
②将小车停在C点,接通电源后(填“前”或“后”),释放小车,小车在细线拉动下运动,记录细线拉力及小车通过A、B时的速度;
③在小车中增加或减小砝码个数,重复②的操作.
(2)表是他们测得的几组数据,|v12-v22|是两个速度传感器记录速度的平方差,可以据此计算出动能变化量△E,F是拉力传感器受到的拉力,W是F在A、B间所做的功.则表格中的△E3=0.600J,W3=0.610J.(结果保留三位有效数字)
(3)第5组探究的结果偏差较大,他们以为产生原因如下,其中有可能的是C.
A.钩码质量太大,细线所受拉力过大,使得小车动能增量偏大
B.平衡摩擦力不足,木板倾角过小,使得小车动能增量偏大
C.平衡摩擦力过度,木板倾角过大,使得小车动能增量偏大
(4)如果已经平衡了摩擦力,用此装置也不能(填“能”或“不能”)验证小车、砝码以及钩码组成的系统机械能守恒,理由是有摩擦力做功.
0 143958 143966 143972 143976 143982 143984 143988 143994 143996 144002 144008 144012 144014 144018 144024 144026 144032 144036 144038 144042 144044 144048 144050 144052 144053 144054 144056 144057 144058 144060 144062 144066 144068 144072 144074 144078 144084 144086 144092 144096 144098 144102 144108 144114 144116 144122 144126 144128 144134 144138 144144 144152 176998
某实验小组利用拉力传感器和速度传感器探究“功与动能变化的关系”.实验装置如图所示,他们将拉力传感器固定在小车上,用不可伸长的细线将其通过一个定滑轮与钩码相连,用拉力传感器记录小车受到拉力的大小.水平桌面上相距L的A、B两点各安装一个速度传感器,记录小车通过A、B时的速度大小.小车中可以放置砝码.(1)实验主要步骤如下:
①测量小车、砝码和拉力传感器的总质量M;把细线的一端固定在拉力传感器上,另一端通过定滑轮与钩码相连;正确连接所需电路;
②将小车停在C点,接通电源后(填“前”或“后”),释放小车,小车在细线拉动下运动,记录细线拉力及小车通过A、B时的速度;
③在小车中增加或减小砝码个数,重复②的操作.
(2)表是他们测得的几组数据,|v12-v22|是两个速度传感器记录速度的平方差,可以据此计算出动能变化量△E,F是拉力传感器受到的拉力,W是F在A、B间所做的功.则表格中的△E3=0.600J,W3=0.610J.(结果保留三位有效数字)
| 次数 | M/kg | |v12-v22|(m/s)2 | △E/J | F/N | W/J |
| 1 | 0.500 | 0.760 | 0.190 | 0.400 | 0.200 |
| 2 | 0.500 | 1.65 | 0.413 | 0.840 | 0.420 |
| 3 | 0.500 | 2.40 | △E3 | 1.220 | W3 |
| 4 | 1.000 | 2.40 | 1.20 | 2.420 | 1.21 |
| 5 | 1.000 | 3.24 | 1.62 | 2.860 | 1.43 |
A.钩码质量太大,细线所受拉力过大,使得小车动能增量偏大
B.平衡摩擦力不足,木板倾角过小,使得小车动能增量偏大
C.平衡摩擦力过度,木板倾角过大,使得小车动能增量偏大
(4)如果已经平衡了摩擦力,用此装置也不能(填“能”或“不能”)验证小车、砝码以及钩码组成的系统机械能守恒,理由是有摩擦力做功.