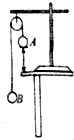
 要测量两个质量不等的沙袋的质量,由于没有直接的测量工具,某实验小组选用下列器材:轻质定滑轮(质量和摩擦可忽略)、砝码一套(总质量m=0.5kg)、细线、刻度尺、秒表.他们根据已学过的物理学知识,改变实验条件进行多次测量,选择合适的变量得到线性关系,作出图线并根据图线的斜率和截距求出沙袋的质量.请完成下列步骤.
要测量两个质量不等的沙袋的质量,由于没有直接的测量工具,某实验小组选用下列器材:轻质定滑轮(质量和摩擦可忽略)、砝码一套(总质量m=0.5kg)、细线、刻度尺、秒表.他们根据已学过的物理学知识,改变实验条件进行多次测量,选择合适的变量得到线性关系,作出图线并根据图线的斜率和截距求出沙袋的质量.请完成下列步骤.
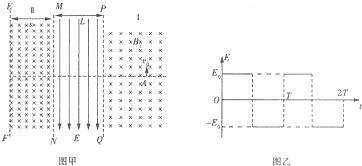 如图甲所示,在平行边界MN、PQ之间存在宽度为L的匀强电场,电场周期性变化的规律如图乙所示,取竖直向下为电场正方向;在平行边界MN、EF之间存在宽度为s、方向垂直纸面向里的匀强磁场区域Ⅱ,在PQ右侧有宽度足够大、方向垂直纸面向里的匀强磁场区域I.在区域I中距PQ距离为L的A点,有一质量为m、电荷量为q、重力不计的带正电粒子以初速度v0沿竖直向上方向开始运动,以此作为计时起点,再经过一段时间粒子又恰好回到A点,如此循环,粒子循环运动一周,电场恰好变化一个周期,已知粒子离开区域I进入电场时,速度恰好与电场方向垂直,sin 53°=0.8,cos 53°=0.6.
如图甲所示,在平行边界MN、PQ之间存在宽度为L的匀强电场,电场周期性变化的规律如图乙所示,取竖直向下为电场正方向;在平行边界MN、EF之间存在宽度为s、方向垂直纸面向里的匀强磁场区域Ⅱ,在PQ右侧有宽度足够大、方向垂直纸面向里的匀强磁场区域I.在区域I中距PQ距离为L的A点,有一质量为m、电荷量为q、重力不计的带正电粒子以初速度v0沿竖直向上方向开始运动,以此作为计时起点,再经过一段时间粒子又恰好回到A点,如此循环,粒子循环运动一周,电场恰好变化一个周期,已知粒子离开区域I进入电场时,速度恰好与电场方向垂直,sin 53°=0.8,cos 53°=0.6.
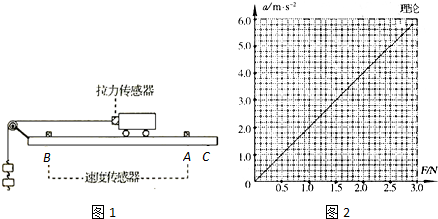
12.图1为用拉力传感器和速度传感器探究“加速度与物体所受合力关系”的实验装置.拉力传感器能记录小车受到拉力的大小.在长木板上相距L=48.00cm 的A、B两位置各安装一个速度传感器,分别记录小车到达A、B时的瞬时速率.实验主要步骤如下:
①将拉力传感器固定在小车上
②把木板C端适当垫高,平衡摩擦力
③把细线的一端固定在拉力传感器上,另一端通过定滑轮与钩码相连
④接通电源后自C点释放小车,小车在细线拉动下运动,记录细线拉力F的大小及小车分别到达A、B 时的瞬时速率vA、vB
⑤改变所挂钩码的数量,重复④的操作
(1)步骤②中,平衡的摩擦力是指
A.小车与长木板之间的摩擦力
B.细线与定滑轮之间的摩擦力
C.小车与长木板之间的摩擦力和细线与定滑轮之间的摩擦力
(2)表中记录了实验测得的几组数据,vB2-vA2是两个速度传感器记录速率的平方差,则加速度的表达式 a=$\frac{{v}_{B}^{2}-{v}_{A}^{2}}{2L}$ (用题中的字母符号表示),表中第3次的实验数据为2.44 (结果保留三位有效数字).(纵坐标1.0改成1.5)
(3)由表中数据,在坐标纸上作出a~F关系图线(图2中已画出理论图线);
(4)对比实验图线与理论图线的偏差,你认为合理的解释为没有完全平衡摩擦力..
0 133492 133500 133506 133510 133516 133518 133522 133528 133530 133536 133542 133546 133548 133552 133558 133560 133566 133570 133572 133576 133578 133582 133584 133586 133587 133588 133590 133591 133592 133594 133596 133600 133602 133606 133608 133612 133618 133620 133626 133630 133632 133636 133642 133648 133650 133656 133660 133662 133668 133672 133678 133686 176998
①将拉力传感器固定在小车上
②把木板C端适当垫高,平衡摩擦力
③把细线的一端固定在拉力传感器上,另一端通过定滑轮与钩码相连
④接通电源后自C点释放小车,小车在细线拉动下运动,记录细线拉力F的大小及小车分别到达A、B 时的瞬时速率vA、vB
⑤改变所挂钩码的数量,重复④的操作
(1)步骤②中,平衡的摩擦力是指
A.小车与长木板之间的摩擦力
B.细线与定滑轮之间的摩擦力
C.小车与长木板之间的摩擦力和细线与定滑轮之间的摩擦力
(2)表中记录了实验测得的几组数据,vB2-vA2是两个速度传感器记录速率的平方差,则加速度的表达式 a=$\frac{{v}_{B}^{2}-{v}_{A}^{2}}{2L}$ (用题中的字母符号表示),表中第3次的实验数据为2.44 (结果保留三位有效数字).(纵坐标1.0改成1.5)
| 次数 | F(N) | vB2-vA2 (m2/s2) | a(m/s2) |
| 1 | 0.60 | 0.77 | 0.80 |
| 2 | 1.04 | 1.61 | 1.68 |
| 3 | 1.42 | 2.34 | |
| 4 | 2.62 | 4.65 | 4.84 |
| 5 | 3.00 | 5.49 | 5.72 |
(4)对比实验图线与理论图线的偏差,你认为合理的解释为没有完全平衡摩擦力..

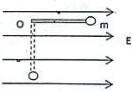 在场强为E的水平方向的匀强电场中,有一质量不计的轻杆,可绕杆的一端O自由转动,另一端连一质量为m的带正电的小球,把杆拉成水平后由静止释放(如图).若小球达到最低位置时速度恰好为零,则小球所带的电量是$\frac{mg}{E}$.
在场强为E的水平方向的匀强电场中,有一质量不计的轻杆,可绕杆的一端O自由转动,另一端连一质量为m的带正电的小球,把杆拉成水平后由静止释放(如图).若小球达到最低位置时速度恰好为零,则小球所带的电量是$\frac{mg}{E}$.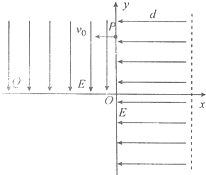 如图所示的直角坐标系中有三块场区,其中第一、四象限内有宽度d未知的匀强电场,其场强大小为E,y轴是其左边界,场强方向沿x轴负向.第二象限有一个场强也为E,方向沿y轴负向的电场区域.第三象限有一个面积未知的矩形交变匀强磁场,磁感应强度为B=8T,每当电荷进入磁场区域后磁场方向不变,待下一次再进入此磁场区域时磁场方向恰好相反.现有一个质量m=2×10-4kg,电荷量为q=+1×10-4C的点电荷,以v0=2m/s的初速度从点P(0,$\sqrt{3}$)沿垂直y轴方向射入第二象限的电场中,接着从点Q(-2,0)进入第三象限,穿过矩形磁场区域后垂直y轴进入第四象限的有界电场中,此后电荷在此空间中周期性运动.若不计电荷的重力,试求:
如图所示的直角坐标系中有三块场区,其中第一、四象限内有宽度d未知的匀强电场,其场强大小为E,y轴是其左边界,场强方向沿x轴负向.第二象限有一个场强也为E,方向沿y轴负向的电场区域.第三象限有一个面积未知的矩形交变匀强磁场,磁感应强度为B=8T,每当电荷进入磁场区域后磁场方向不变,待下一次再进入此磁场区域时磁场方向恰好相反.现有一个质量m=2×10-4kg,电荷量为q=+1×10-4C的点电荷,以v0=2m/s的初速度从点P(0,$\sqrt{3}$)沿垂直y轴方向射入第二象限的电场中,接着从点Q(-2,0)进入第三象限,穿过矩形磁场区域后垂直y轴进入第四象限的有界电场中,此后电荷在此空间中周期性运动.若不计电荷的重力,试求: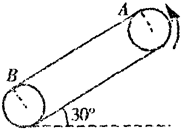 如图所示,皮带传动装置与水平面夹角为30°,两轮轴心相距L=2.85m,A、B分别是传送带的上表面与两轮的切点.已知两轮的边缘与传送带之间不打滑,质量为0.1kg的小物块与传送带间的动摩擦因数为μ=$\frac{{\sqrt{3}}}{6}$.当传送带沿逆时针方向以v1=3m/s的速度匀速运动时,将小物块无初速度地放在A点,它会运动至B点.求:(g取10m/s2)
如图所示,皮带传动装置与水平面夹角为30°,两轮轴心相距L=2.85m,A、B分别是传送带的上表面与两轮的切点.已知两轮的边缘与传送带之间不打滑,质量为0.1kg的小物块与传送带间的动摩擦因数为μ=$\frac{{\sqrt{3}}}{6}$.当传送带沿逆时针方向以v1=3m/s的速度匀速运动时,将小物块无初速度地放在A点,它会运动至B点.求:(g取10m/s2)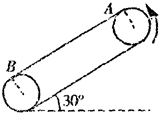 如图所示,皮带传动装置与水平面夹角为30°,两轮轴心相距L=2.85m,A.B分别是传送带的上表面与两轮的切点.已知两轮的边缘与传送带之间不打滑,质量为0.1kg的小物块与传送带间的动摩擦因数为μ=$\frac{{\sqrt{3}}}{6}$.当传送带沿逆时针方向以v1=3m/s的速度匀速运动时,将小物块无初速度地放在A点,它会运动至B点.求:(g取10m/s2)
如图所示,皮带传动装置与水平面夹角为30°,两轮轴心相距L=2.85m,A.B分别是传送带的上表面与两轮的切点.已知两轮的边缘与传送带之间不打滑,质量为0.1kg的小物块与传送带间的动摩擦因数为μ=$\frac{{\sqrt{3}}}{6}$.当传送带沿逆时针方向以v1=3m/s的速度匀速运动时,将小物块无初速度地放在A点,它会运动至B点.求:(g取10m/s2)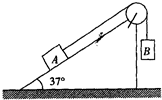 如图所示,物块A.B用一轻绳跨过定滑轮相连,A放在倾角为37°的固定斜面上,B竖直悬挂并保持静止,连接A与定滑轮的细绳与斜面平行.已知物块A的质量mA=20kg,物块与斜面间的动摩擦因数μ=0.5,sin37°=0.6,cos37°=0.8,重力加速度g=10m/s2,最大静摩擦力等于滑动摩擦力,求物块B的质量mB的可能取值.
如图所示,物块A.B用一轻绳跨过定滑轮相连,A放在倾角为37°的固定斜面上,B竖直悬挂并保持静止,连接A与定滑轮的细绳与斜面平行.已知物块A的质量mA=20kg,物块与斜面间的动摩擦因数μ=0.5,sin37°=0.6,cos37°=0.8,重力加速度g=10m/s2,最大静摩擦力等于滑动摩擦力,求物块B的质量mB的可能取值.