4.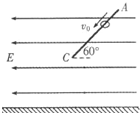 如图所示,在水平向左的匀强电场中有一表面光滑、与水平成60°角的绝缘直杆AC,其下端C距离地面有一定高度.一质量为0.5kg的带电小环套在直杆上,以某一速度沿杆匀速下滑.不计空气阻力,重力加速度g=10m/s2.则下列说法正确的是( )
如图所示,在水平向左的匀强电场中有一表面光滑、与水平成60°角的绝缘直杆AC,其下端C距离地面有一定高度.一质量为0.5kg的带电小环套在直杆上,以某一速度沿杆匀速下滑.不计空气阻力,重力加速度g=10m/s2.则下列说法正确的是( )
如图所示,在水平向左的匀强电场中有一表面光滑、与水平成60°角的绝缘直杆AC,其下端C距离地面有一定高度.一质量为0.5kg的带电小环套在直杆上,以某一速度沿杆匀速下滑.不计空气阻力,重力加速度g=10m/s2.则下列说法正确的是( )| A. | 小环带正电 | |
| B. | 小环受到的电场力大小为10N | |
| C. | 小环离开直杆后做类平抛运动 | |
| D. | 小环在地面上的落点不可能在C点正下方 |
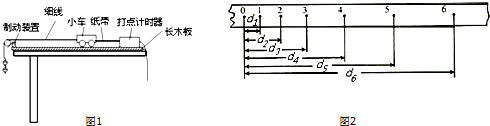
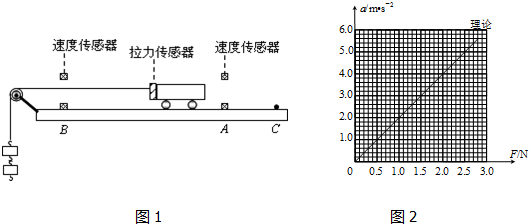
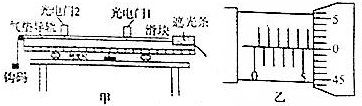
2.如图1为用拉力传感器和速度传感器探究“加速度与物体受力的关系”实验装置.用拉力传感器记录小车受到拉力的大小,在长木板上相距L=48.0cm的A、B两点各安装一个速度传感器,分别记录小车到达A、B时的速率.
(1)实验主要步骤如下:
①将拉力传感器固定在小车上;
②调整长木板的倾斜角度,以平衡小车受到的摩擦力,让小车在不受拉力作用时能在木板上做匀速直线运动;
③把细线的一端固定在拉力传感器上,另一端通过定滑轮与钩码相连;
④接通电源后自C点释放小车,小车在细线拉动下运动,记录细线拉力F的大小及小车分别到达A、B时的速率vA、vB;
⑤改变所挂钩码的数量,重复④的操作.
(2)表中记录了实验测得的几组数据,vB2-vA2是两个速度传感器记录速率的平方差,则加速度的表达式a=,请将表中第3次的实验数据填写完整(结果保留三位有效数字);
(3)由表中数据在坐标纸上描点并作出a~F关系图线;
(4)对比实验结果与理论计算得到的关系图线(图中已画出理论图线),造成上述偏差的原因是没有完全平衡摩擦力.
(1)实验主要步骤如下:
①将拉力传感器固定在小车上;
②调整长木板的倾斜角度,以平衡小车受到的摩擦力,让小车在不受拉力作用时能在木板上做匀速直线运动;
③把细线的一端固定在拉力传感器上,另一端通过定滑轮与钩码相连;
④接通电源后自C点释放小车,小车在细线拉动下运动,记录细线拉力F的大小及小车分别到达A、B时的速率vA、vB;
⑤改变所挂钩码的数量,重复④的操作.
(2)表中记录了实验测得的几组数据,vB2-vA2是两个速度传感器记录速率的平方差,则加速度的表达式a=,请将表中第3次的实验数据填写完整(结果保留三位有效数字);
| 次数 | F(N) | vB2-vA2(m2/s2) | a(m/s2) |
| 1 | 0.60 | 0.77 | 0.80 |
| 2 | 1.04 | 1.61 | 1.68 |
| 3 | 1.42 | 2.34 | 2.44 |
| 4 | 2.00 | 3.48 | 3.63 |
| 5 | 2.62 | 4.65 | 4.84 |
| 6 | 3.00 | 5.49 | 5.72 |
(4)对比实验结果与理论计算得到的关系图线(图中已画出理论图线),造成上述偏差的原因是没有完全平衡摩擦力.
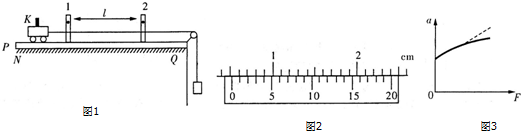
1.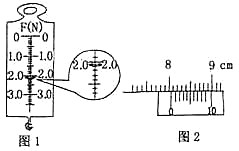 在“探究弹力和弹簧伸长的关系”实验中,用测力计测出弹簧的弹力F,用游标卡尺测出弹簧的总长度L,得到下表中的数据.
在“探究弹力和弹簧伸长的关系”实验中,用测力计测出弹簧的弹力F,用游标卡尺测出弹簧的总长度L,得到下表中的数据.
(1)由图1读出F2的值为2.10N;由图2读出l1的值为8.05cm.
(2)由表中的数据,可写出F与l的关系式为:F=52l-3.12N.
在“探究弹力和弹簧伸长的关系”实验中,用测力计测出弹簧的弹力F,用游标卡尺测出弹簧的总长度L,得到下表中的数据.| 弹力F(N) | 0 | 1.00 | F2 | 3.12 |
| 弹簧总长度l(cm) | 6.00 | l1 | 10.10 | 12.00 |
(2)由表中的数据,可写出F与l的关系式为:F=52l-3.12N.
 某实验小组成员要做“探究加速度与合外力,质量关系”实验.
某实验小组成员要做“探究加速度与合外力,质量关系”实验.
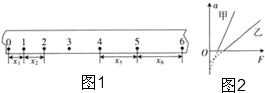
17. 将等量的正、负电荷分别放在正方形的四个顶点上,(如图所示).O点为该正方形对角线的交点,直线段AB通过O点且垂直于该正方形,OA>OB,以下对A、B两点的电势和场强的判断,正确的是( )
将等量的正、负电荷分别放在正方形的四个顶点上,(如图所示).O点为该正方形对角线的交点,直线段AB通过O点且垂直于该正方形,OA>OB,以下对A、B两点的电势和场强的判断,正确的是( )
0 133145 133153 133159 133163 133169 133171 133175 133181 133183 133189 133195 133199 133201 133205 133211 133213 133219 133223 133225 133229 133231 133235 133237 133239 133240 133241 133243 133244 133245 133247 133249 133253 133255 133259 133261 133265 133271 133273 133279 133283 133285 133289 133295 133301 133303 133309 133313 133315 133321 133325 133331 133339 176998
将等量的正、负电荷分别放在正方形的四个顶点上,(如图所示).O点为该正方形对角线的交点,直线段AB通过O点且垂直于该正方形,OA>OB,以下对A、B两点的电势和场强的判断,正确的是( )| A. | A点场强等于B点场强 | B. | A点场强小于B点场强 | ||
| C. | A点电势高于B点电势 | D. | A点电势等于B点电势 |
 如图所示,平行板M和N之间有匀强电场,N板接地,A、B、C是电场中的三点,其中A点距离N板1cm.已知电量为q=2.0×10-9C的正电荷在B点时受到的电场力F=8.0×10-6N,将该电荷从B点移到C点电场力做的功为W=4.0×10-7J.求:
如图所示,平行板M和N之间有匀强电场,N板接地,A、B、C是电场中的三点,其中A点距离N板1cm.已知电量为q=2.0×10-9C的正电荷在B点时受到的电场力F=8.0×10-6N,将该电荷从B点移到C点电场力做的功为W=4.0×10-7J.求: