11.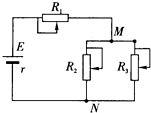 如图所示,电源电动势为E,内阻为r,R1、R2、R3是三个可变电阻,在这三个可变电阻发生下列各组变化过程中,一定能够使通过R3的电流变小的是哪一组( )
如图所示,电源电动势为E,内阻为r,R1、R2、R3是三个可变电阻,在这三个可变电阻发生下列各组变化过程中,一定能够使通过R3的电流变小的是哪一组( )
如图所示,电源电动势为E,内阻为r,R1、R2、R3是三个可变电阻,在这三个可变电阻发生下列各组变化过程中,一定能够使通过R3的电流变小的是哪一组( )| A. | 只R1变小 | B. | 只R3变小 | C. | 只R1、R3变小 | D. | 只R2变小 |
10.一辆汽车从车站由静止出发,做匀加速直线运动,开出一段时间之后,司机发现一乘客未上车,便紧急刹车做匀减速运动直到停止.若已知从启动到停止经历的时间及前进的距离,则由此可求出( )
| A. | 此过程中车运动的最大速度 | B. | 匀加速运动的时间 | ||
| C. | 匀加速运动的加速度 | D. | 匀减速过程的平均速度 |
9.国庆长假期间,小马和同学乘火车旅行,他乘坐的火车在某火车站停靠时,另一列货车正好也停靠在车站,小马正好奇地看着货车时,发现自己乘坐的火车在“后退”.疑惑间他看到了车站的站牌,发现自己乘坐的火车并没有运动,而是货车向前方开动了.小马和同学就这个话题进行了讨论,下列说法中正确的是( )
| A. | 小马发现自己乘坐的火车在“后退”是以向前开动的货车为参考系 | |
| B. | 发现自己乘坐的火车并没有运动,是以车站的站牌为参考系 | |
| C. | 选取不同的参考系,对物体运动的描述往往是不同的 | |
| D. | 参考系必须选取地面 |
7.关于麦克斯韦的电磁场理论,下列说法中正确的是( )
| A. | 在电场周围一定产生磁场,磁场周围一定产生电场 | |
| B. | 周期性变化的电场周围一定产生周期性变化的磁场 | |
| C. | 均匀变化的电场周围一定产生均匀变化的磁场 | |
| D. | 在变化的电场周围一定产生变化的磁场,变化的磁场周围一定产生变化的电场 |
6.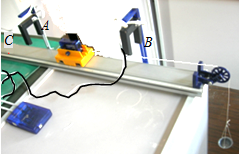 某实验小组利用无线力传感器和光电门传感器探究“做功与物体速度变化的关系”.将无线力传感器和档光片固定在小车上,用不可伸长的细线通过一个定滑轮与重物G相连,无线力传感器记录小车受到拉力的大小.在水平轨道上A、B两点各固定一个光电门传感器,用于测量小车的速度v1和v2,如图所示.在小车上放置砝码来改变小车质量,用不同的重物G来改变拉力的大小.
某实验小组利用无线力传感器和光电门传感器探究“做功与物体速度变化的关系”.将无线力传感器和档光片固定在小车上,用不可伸长的细线通过一个定滑轮与重物G相连,无线力传感器记录小车受到拉力的大小.在水平轨道上A、B两点各固定一个光电门传感器,用于测量小车的速度v1和v2,如图所示.在小车上放置砝码来改变小车质量,用不同的重物G来改变拉力的大小.
(1)实验主要步骤如下:
①测量小车和拉力传感器的总质量M1.正确连接所需电路.调节导轨两端的旋钮改变导轨的倾斜度,用以平衡小车的摩擦力.将小车放置在导轨上,轻推小车,使之运动.可以通过小车经过两光电门的时间是否相等判断小车正好做匀速运动.
②把细线的一端固定在力传感器上,另一端通过定滑轮与重物G相连;将小车停在点C,由静止开始释放小车,小车在细线拉动下运动,除了光电门传感器测量速度和力传感器测量拉力的数据以外,还应该记录的物理量为两光电门间的距离.
③改变小车的质量或重物的质量,重复②的操作.
(2)表格中M是M1与小车中砝码质量之和,△E为动能变化量,F是拉力传感器的拉力,W是F在A、B间所做的功.表中的△E3=0.600J,W3=0.610J.(结果保留3位有效数字)
0 132907 132915 132921 132925 132931 132933 132937 132943 132945 132951 132957 132961 132963 132967 132973 132975 132981 132985 132987 132991 132993 132997 132999 133001 133002 133003 133005 133006 133007 133009 133011 133015 133017 133021 133023 133027 133033 133035 133041 133045 133047 133051 133057 133063 133065 133071 133075 133077 133083 133087 133093 133101 176998
某实验小组利用无线力传感器和光电门传感器探究“做功与物体速度变化的关系”.将无线力传感器和档光片固定在小车上,用不可伸长的细线通过一个定滑轮与重物G相连,无线力传感器记录小车受到拉力的大小.在水平轨道上A、B两点各固定一个光电门传感器,用于测量小车的速度v1和v2,如图所示.在小车上放置砝码来改变小车质量,用不同的重物G来改变拉力的大小.(1)实验主要步骤如下:
①测量小车和拉力传感器的总质量M1.正确连接所需电路.调节导轨两端的旋钮改变导轨的倾斜度,用以平衡小车的摩擦力.将小车放置在导轨上,轻推小车,使之运动.可以通过小车经过两光电门的时间是否相等判断小车正好做匀速运动.
②把细线的一端固定在力传感器上,另一端通过定滑轮与重物G相连;将小车停在点C,由静止开始释放小车,小车在细线拉动下运动,除了光电门传感器测量速度和力传感器测量拉力的数据以外,还应该记录的物理量为两光电门间的距离.
③改变小车的质量或重物的质量,重复②的操作.
(2)表格中M是M1与小车中砝码质量之和,△E为动能变化量,F是拉力传感器的拉力,W是F在A、B间所做的功.表中的△E3=0.600J,W3=0.610J.(结果保留3位有效数字)
| 次数 | M/kg | |v22-v12|/m2•s2 | DE/J | F/N | W/J |
| 1 | 0.500 | 0.760 | 0.190 | 0.400 | 0.200 |
| 2 | 0.500 | 1.650 | 0.413 | 0.840 | 0.420 |
| 3 | 0.500 | 2.400 | DE3 | 1.220 | W3 |
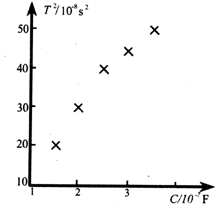 在LC振荡电路中,如已知电容C,并测得电路的固有振荡周期T,即可求得电感L.为了提高测量精度,需多次改变C值并测得相应的T值.现将测得的6组数据标示在以C为横坐标、T2为纵坐标的坐标纸上,即图中“×”表示的点.
在LC振荡电路中,如已知电容C,并测得电路的固有振荡周期T,即可求得电感L.为了提高测量精度,需多次改变C值并测得相应的T值.现将测得的6组数据标示在以C为横坐标、T2为纵坐标的坐标纸上,即图中“×”表示的点.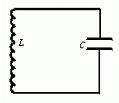 如图所示,LC振荡回路中振荡电流的周期为2×10-2s,自振荡电流沿逆时针方向达到最大值开始计时t=3.14×10-2s时,电容器正处于状态充电(填充电、放电、充电完毕或放电完毕).这时电容器的下极板带负电(填带正电、带负电或不带电).
如图所示,LC振荡回路中振荡电流的周期为2×10-2s,自振荡电流沿逆时针方向达到最大值开始计时t=3.14×10-2s时,电容器正处于状态充电(填充电、放电、充电完毕或放电完毕).这时电容器的下极板带负电(填带正电、带负电或不带电).