12. 一带负电的粒子在电场线平行于轴的电场中沿轴正向运动,其电势能Ep随位移x的变化关系如图所示,则下列说法正确的是( )
一带负电的粒子在电场线平行于轴的电场中沿轴正向运动,其电势能Ep随位移x的变化关系如图所示,则下列说法正确的是( )
一带负电的粒子在电场线平行于轴的电场中沿轴正向运动,其电势能Ep随位移x的变化关系如图所示,则下列说法正确的是( )| A. | x1、x2、x3处的电势φ1、φ2、φ3的关系为φ1=φ3>φ2 | |
| B. | 此电场为匀强电场 | |
| C. | x2处电场强度为零 | |
| D. | 粒子由x1到x2和x2到x3,电场力做功相等 |
11. 如图甲所示,水平地面上固定一倾角为θ的足够长斜面,一质量为m的小物块(可视为质点)静止在斜面上O点,现给小物块施加一平行于斜面向上的拉力F,使小物块沿斜面向上运动,其运动过程中的机械能E随离开O点的位移x变化的关系如图乙所示,其中O-x1的图线为曲线,x1-x2的图线为直线,若小物块与斜面间的动摩擦因数为μ,则小物块从开始运动直到位移为x2的过程中( )
如图甲所示,水平地面上固定一倾角为θ的足够长斜面,一质量为m的小物块(可视为质点)静止在斜面上O点,现给小物块施加一平行于斜面向上的拉力F,使小物块沿斜面向上运动,其运动过程中的机械能E随离开O点的位移x变化的关系如图乙所示,其中O-x1的图线为曲线,x1-x2的图线为直线,若小物块与斜面间的动摩擦因数为μ,则小物块从开始运动直到位移为x2的过程中( )
如图甲所示,水平地面上固定一倾角为θ的足够长斜面,一质量为m的小物块(可视为质点)静止在斜面上O点,现给小物块施加一平行于斜面向上的拉力F,使小物块沿斜面向上运动,其运动过程中的机械能E随离开O点的位移x变化的关系如图乙所示,其中O-x1的图线为曲线,x1-x2的图线为直线,若小物块与斜面间的动摩擦因数为μ,则小物块从开始运动直到位移为x2的过程中( )| A. | 小物块先做加速运动,后做匀速运动 | |
| B. | 小物块的动能一直在增大 | |
| C. | 合力对小物块做的功等于2E0 | |
| D. | 小物块增加的机械能等于拉力与摩擦力做功之和 |
10. 如图电路中,L1、L2为两只完全相同、阻值恒定的灯泡,R为光敏电阻(光阻越强,阻值越小,光敏电阻不受电路中灯泡亮度的影响),闭合电键S后( )
如图电路中,L1、L2为两只完全相同、阻值恒定的灯泡,R为光敏电阻(光阻越强,阻值越小,光敏电阻不受电路中灯泡亮度的影响),闭合电键S后( )
如图电路中,L1、L2为两只完全相同、阻值恒定的灯泡,R为光敏电阻(光阻越强,阻值越小,光敏电阻不受电路中灯泡亮度的影响),闭合电键S后( )| A. | 随着光照强度逐渐增强,两只灯泡均逐渐变暗 | |
| B. | 随着光照强度逐渐增强,电源内电路消耗的功率逐渐增大 | |
| C. | 将滑动变阻器的滑动头逐渐下移,两只灯泡均逐渐变亮 | |
| D. | 将滑动变阻器的滑动头逐渐上移,光敏电阻R和L1灯泡消耗的总功率可能逐渐增大 |
9.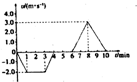 我国“蛟龙号”深潜器在某次实验时,内部显示屏上显示了从水面开始下潜到返回水面过程中的速度图象,如图所示,以下判断正确的是( )
我国“蛟龙号”深潜器在某次实验时,内部显示屏上显示了从水面开始下潜到返回水面过程中的速度图象,如图所示,以下判断正确的是( )
我国“蛟龙号”深潜器在某次实验时,内部显示屏上显示了从水面开始下潜到返回水面过程中的速度图象,如图所示,以下判断正确的是( )| A. | 8min-10min内,深潜器中的潜水员处于超重状态 | |
| B. | 4min-6min内,深潜器停在深度为360m处 | |
| C. | 第1min末时和第3min末,深潜器处于同一深度 | |
| D. | 第10min内,深潜器还没有回到水面上 |
 如图所示,两磁感应强度大小相等、方向相反的有界磁场,磁场区域宽度均为d,一底边长为2d的三角形金属线框以一定的速度匀速通过两磁场的过程中,三角形线框中的感应电流i随时间t的变化图象正确的是(取逆时针方向为正)( )
如图所示,两磁感应强度大小相等、方向相反的有界磁场,磁场区域宽度均为d,一底边长为2d的三角形金属线框以一定的速度匀速通过两磁场的过程中,三角形线框中的感应电流i随时间t的变化图象正确的是(取逆时针方向为正)( )



6.闭合电路欧姆定律是恒定电流一章的重点知识,闭合电路中下列叙述中正确的是( )
| A. | E=IR+Ir适应于所有电路 | |
| B. | I=$\frac{E}{R+r}$仅适应于外电路是纯电阻电路 | |
| C. | E=U外+U内适应于纯电阻电路 | |
| D. | 电源的电动势数值上等于电源两极间的电压 |
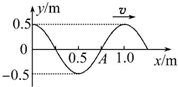 有一列简谐横波在弹性介质中沿x轴正方向以速率v=10m/s传播,某时刻的波形如图1所示,把此时刻作为零时刻,质点A的振动方程为y=-0.5sin20πtmm.
有一列简谐横波在弹性介质中沿x轴正方向以速率v=10m/s传播,某时刻的波形如图1所示,把此时刻作为零时刻,质点A的振动方程为y=-0.5sin20πtmm.
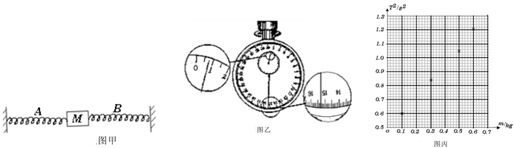
3.任何简谐运动的周期公式都可表示为T=2π$\sqrt{\frac{m}{k}}$,式中T为简谐运动的周期,m为振动物体的质量,k为回复力F与位移x的关系式(即F=-kx)中的比例系数.如图甲所示的实验装置是用来测量弹簧劲度系数和滑块质量所用的弹簧振子,M为待测滑块(滑块上可增加砝码),与滑块相连的两轻质弹簧A、B完全相同.整个装置置于水平气垫导轨上,气垫导轨可使滑块在运动过程中不受摩擦力,A弹簧的左端和B弹簧的右端固定在气垫导轨上.为了测出滑块未加砝码时的质量及弹簧A的劲度系数,某同学用秒表分别测出了加上不同质量的砝码时滑块做简谐运动的周期,实验数据记录如下表所示.
(1)为了减小实验误差,可用秒表测出滑块运动50个周期的总时间t,再得到周期T=$\frac{t}{50}$,测量时以滑块C开始计时有利于减小计时误差.
A.开始运动时 B.到达最大位移处时 C.通过平衡位置时
(2)如图乙为某次测量 50 个周期时秒表的示数,则该振动的周期为0.906s(结果保留3位有效数字).
(3)根据表格记录的实验数据,在如图丙所示的坐标纸上,以m(为滑块上所加砝码的质量)为横坐标,T2为纵坐标,作出T2-m图象.图中已描出4个点,请根据表中数据描出另外两点,并完成T2-m 图象.
(4)根据T2-m图象可得出未加砝码时滑块的质量为0.40kg,弹簧A的劲度系数为16N/m.(取π2=10,最后结果保留2位有效数字).
0 127863 127871 127877 127881 127887 127889 127893 127899 127901 127907 127913 127917 127919 127923 127929 127931 127937 127941 127943 127947 127949 127953 127955 127957 127958 127959 127961 127962 127963 127965 127967 127971 127973 127977 127979 127983 127989 127991 127997 128001 128003 128007 128013 128019 128021 128027 128031 128033 128039 128043 128049 128057 176998
| 实验次数 | 所加砝码质量(kg) | 50个周期的时间t(s) | 振动周期T(s) | T2的值(s2) |
| 1 | 0.100 | 38.7 | 0.774 | 0.599 |
| 2 | 0.200 | 42.4 | 0.848 | 0.719 |
| 3 | 0.300 | 45.8 | 0.916 | 0.839 |
| 4 | 0.400 | 49.0 | 0.980 | 0.960 |
| 5 | 0.500 | 51.9 | 1.04 | 1.08 |
| 6 | 0.600 | 54.9 | 1.10 | 1.21 |
A.开始运动时 B.到达最大位移处时 C.通过平衡位置时
(2)如图乙为某次测量 50 个周期时秒表的示数,则该振动的周期为0.906s(结果保留3位有效数字).
(3)根据表格记录的实验数据,在如图丙所示的坐标纸上,以m(为滑块上所加砝码的质量)为横坐标,T2为纵坐标,作出T2-m图象.图中已描出4个点,请根据表中数据描出另外两点,并完成T2-m 图象.
(4)根据T2-m图象可得出未加砝码时滑块的质量为0.40kg,弹簧A的劲度系数为16N/m.(取π2=10,最后结果保留2位有效数字).