题目内容
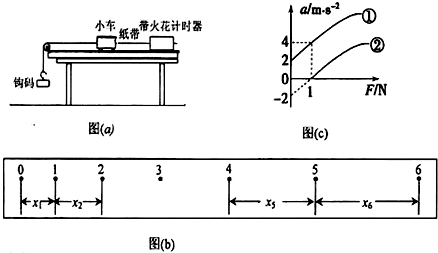
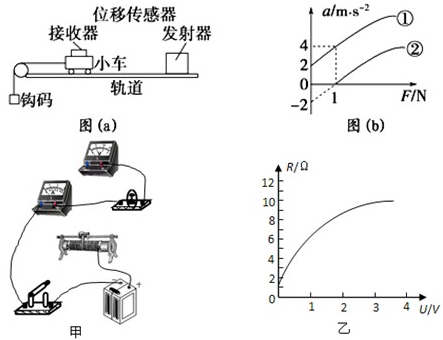
某实验小组设计了如图(a)所示的实验装置,用钩码所受重力作为小车所受的拉力,用DIS测小车的加速度.通过改变钩码的数量,多次重复测量,可得小车运动的加速度a和所受拉力F的关系图象.他们在轨道水平和倾斜的两种情况下分别做了实验,得到了两条“a一F图线,如图(b)所示.(1)图线 是在轨道右侧抬高成为斜面情况下得到的;(选填“①”或“②”)
(2)随着钩码的数量增大到一定程度时图(b)的图线明显偏离直线,造成此误差的主要原因是所挂钩码的总质量太大,为消除此误差可采取的简便且有效的措施是
B.调整轨道的倾角,在未挂钩码时使小车能在轨道上长时间缓慢运动(即将小车与传感器发射部分的重力沿轨道方向的分力恰与其所受摩擦力平衡)
C.在增加钩码数量进行实验的同时在小车上增加砝码,使钩码的总质量始终远小于小车与传感器发射部分的总质量
C在钩码与细绳之间放置一力传感器,直接得到小车运动的加速度a和力传感器读数F的关系图象
D.更换实验中使用的钩码规格,采用质量较小的钩码进行上述实验
(3)小车和位移传感器发射部分的总质量m= kg;滑块和轨道问的动摩擦因数μ=

【答案】分析:解决实验问题首先要掌握该实验原理,了解实验的操作步骤和操作细节;
根据a-F图象的特点结合牛顿第二定律求解.
理解该实验的实验原理和数据处理以及注意事项,知道实验误差的来源.
解答:解:(1)由图象可知,当F=0时,a≠0.也就是说当绳子上没有拉力时小车就有加速度,该同学实验操作中平衡摩擦力过大,即倾角过大,平衡摩擦力时木板的右端垫得过高.
所以图线①是在轨道右侧抬高成为斜面情况下得到的.
(2)随着钩码的数量增大到一定程度时图(b)的图线明显偏离直线,造成此误差的主要原因是所挂钩码的总质量太大,而我们把用钩码所受重力作为小车所受的拉力,
所以消除此误差可采取的简便且有效的措施应该测量出小车所受的拉力,即在钩码与细绳之间放置一力传感器,得到力F的数值,在作出小车运动的加速度a和力传感器读数F的关系图象,故选C.
(3)根据F=ma得a-F图象的斜率k= ,
,
由a-F图象得图象斜率k=2,所以m=0.5kg.
由a-F图象②得,当F=1N时,物体即将要滑动,即最大静摩擦力等于1N,
所以滑块和轨道问的动摩擦因数μ= =0.2
=0.2
故答案为:(1)①
(2)C
(3)0.5,0.2.
点评:对于实验我们要明确实验原理、具体实验操作以及数据处理等,同时要清楚每一项操作存在的理由,只有掌握好了基本知识和基本方法才能顺利解决实验题目,所以要重视基本知识和基本方法的学习和训练.
根据a-F图象的特点结合牛顿第二定律求解.
理解该实验的实验原理和数据处理以及注意事项,知道实验误差的来源.
解答:解:(1)由图象可知,当F=0时,a≠0.也就是说当绳子上没有拉力时小车就有加速度,该同学实验操作中平衡摩擦力过大,即倾角过大,平衡摩擦力时木板的右端垫得过高.
所以图线①是在轨道右侧抬高成为斜面情况下得到的.
(2)随着钩码的数量增大到一定程度时图(b)的图线明显偏离直线,造成此误差的主要原因是所挂钩码的总质量太大,而我们把用钩码所受重力作为小车所受的拉力,
所以消除此误差可采取的简便且有效的措施应该测量出小车所受的拉力,即在钩码与细绳之间放置一力传感器,得到力F的数值,在作出小车运动的加速度a和力传感器读数F的关系图象,故选C.
(3)根据F=ma得a-F图象的斜率k=
 ,
,由a-F图象得图象斜率k=2,所以m=0.5kg.
由a-F图象②得,当F=1N时,物体即将要滑动,即最大静摩擦力等于1N,
所以滑块和轨道问的动摩擦因数μ=
 =0.2
=0.2故答案为:(1)①
(2)C
(3)0.5,0.2.
点评:对于实验我们要明确实验原理、具体实验操作以及数据处理等,同时要清楚每一项操作存在的理由,只有掌握好了基本知识和基本方法才能顺利解决实验题目,所以要重视基本知识和基本方法的学习和训练.

练习册系列答案
 开心试卷期末冲刺100分系列答案
开心试卷期末冲刺100分系列答案 双基同步导航训练系列答案
双基同步导航训练系列答案 黄冈小状元同步计算天天练系列答案
黄冈小状元同步计算天天练系列答案
相关题目


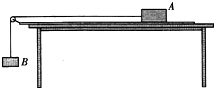 为了测定木块A与木板之间的动摩擦因数,某实验小组设计了如图所示的实验:将木板放在水平桌面上,木块A通过木板上的定滑轮用细线系一小物块B,开始用手拿着物块B使其静止且细线被张紧,松手后A、B一起运动,当B到达地面后停止运动,而木块A继续在木板上运动一段距离后停止运动.本实验除了用天平测出木块A的质量m1和物块B的质量m2外,还需要测量的物理量是
为了测定木块A与木板之间的动摩擦因数,某实验小组设计了如图所示的实验:将木板放在水平桌面上,木块A通过木板上的定滑轮用细线系一小物块B,开始用手拿着物块B使其静止且细线被张紧,松手后A、B一起运动,当B到达地面后停止运动,而木块A继续在木板上运动一段距离后停止运动.本实验除了用天平测出木块A的质量m1和物块B的质量m2外,还需要测量的物理量是