0 91758 91766 91772 91776 91782 91784 91788 91794 91796 91802 91808 91812 91814 91818 91824 91826 91832 91836 91838 91842 91844 91848 91850 91852 91853 91854 91856 91857 91858 91860 91862 91866 91868 91872 91874 91878 91884 91886 91892 91896 91898 91902 91908 91914 91916 91922 91926 91928 91934 91938 91944 91952 235360

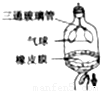 右图是人呼吸过程模拟装置.当向下拉动橡皮膜时,瓶内气体的压强将 ,气球在 的作用下体积比变大.
右图是人呼吸过程模拟装置.当向下拉动橡皮膜时,瓶内气体的压强将 ,气球在 的作用下体积比变大.