(6分)在“验证杠杆平衡条件”的实验中:
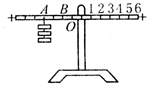
(1)实验前没有挂钩码和弹簧测力计时,发现杠杆左端高右 端低,要使其在水平位置平衡,应将杠杆左端的平衡螺母向 ▲ 调节,这一调节过程的目的是为了使杠杆的重力对杠杆平衡不产生影响,这时杠杆重力的力臂为 ▲ .
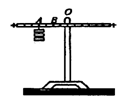
(2)在图中,杠杆水平平衡后,小强调节左边钩码的个数和位置,使杠杆水平平衡时,测出F1=1.2N,F2=1.5N;OA=30cm,OB=20cm.他将所得数据直接代入杠杆平衡条件的公式中,发现F1×OA和F2×OB并不相等,从而认为杠杆的平衡条件不一定是F1 l1= F2 l2.小强的失误是 ▲ 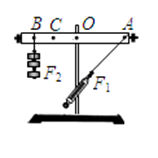
|
在“探究杠杆的平衡条件”实验中,应先调节杠杆两端的平衡螺母,使杠杆在 位置平衡,这样做是为了便于测量 ;如发现杠杆左端偏高,则可将右端的平衡螺母向 调节,或将左端的平衡螺母向 调节。(最后两空填“左”或“右”)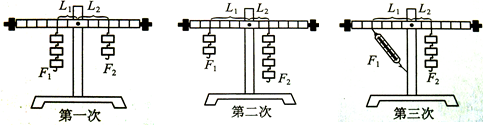
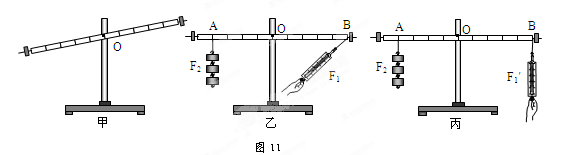
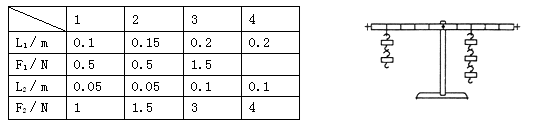
上图是小明同学三次实验的情景,实验时所用的每个钩码重0.5N,杠杆上每一格长5cm,部分实验数据已记录在下表中。
| 实验次数 | 动力F1/N | 动力臂L1/cm | 阻力F2/N | 阻力臂L2/cm |
| 1 | 1.5 | 10 | 1 | 15 |
| 2 | 1 | 20 | | 10 |
| 3 | 1 | 20 | 1.5 | 10 |
(2)小明的第3次实验存在错误,其错误是 。
 ④小东说,在右侧的钩码下增加一个钩码,并向左移动一格,杠杆也可以平衡。
④小东说,在右侧的钩码下增加一个钩码,并向左移动一格,杠杆也可以平衡。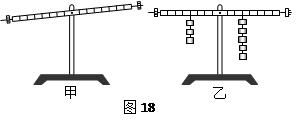
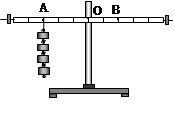
 平衡后,小明在杠杆上A点处挂4个钩码,在B点处挂6个钩码杠杆恰好在原位置平衡。于是小明便得出了杠杆的平衡条件为:F1 l1= F2 l2。他这样得出的结论是否合理?
平衡后,小明在杠杆上A点处挂4个钩码,在B点处挂6个钩码杠杆恰好在原位置平衡。于是小明便得出了杠杆的平衡条件为:F1 l1= F2 l2。他这样得出的结论是否合理?  ;为什么? 。
;为什么? 。