 22、(1)如图甲,密度均匀的直杆AB,自重为G1,AB的一部分伸出桌外当B端挂G2物体时,杆刚刚开始翘起,O为直杆刚翘起时,杆与桌面边缘的接触点).若G2对绳子产生的拉力为动力,则请画出杆AB所受阻力F的力臂l2.
22、(1)如图甲,密度均匀的直杆AB,自重为G1,AB的一部分伸出桌外当B端挂G2物体时,杆刚刚开始翘起,O为直杆刚翘起时,杆与桌面边缘的接触点).若G2对绳子产生的拉力为动力,则请画出杆AB所受阻力F的力臂l2.
如图1所示,某小组研究“杠杆的平衡条件”,器材:有刻度的杠杆、若干个相同的钩码、弹簧测力计等,O为杠杆的支点.
①实验前,应先调节杠杆在 位置平衡.这样做,除了可以消除自身的重力影响,还可以方便地测量或读出 .调节时,如发现杠杆左端偏高,应如何操作: .

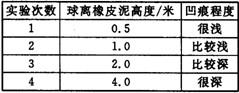
②某实验小组记录两组数据如下:
根据分析,这组数据中,实验序号为 选填:“1”或“2”)的一组肯定有错误.检查发现是测量动力臂时读错了,动力臂的实际值比记录值 (选填:大或小).
③如图2所示,弹簧测力计在C处由竖直向上逐渐向右倾斜拉动杠杆,仍使杠杆在水平位置保持平衡,则弹簧测力计的示数将 (选填:变大、变小或保持不变),其原因是 .
④某次实验中,若采取如图3所示的方式悬挂钩码,杠杆也能在水平位置保持平衡(杠杆上每格等距),但老师却往往提醒大家不要采用这种方式,这主要是以下哪种原因 (选填字母).
A.一个人无法独立操作 B.需要使用太多的钩码
C.力臂与杠杆不重合 D.力和力臂数目过多
⑤如图4所示,实验小组选用长1.6m、粗细均匀的一只金属杆,绕O点在竖直平面内自由转动,同时将一个“拉力--位移传感器”竖直作用在杆上,并使杠杆在水平位置始终保持平衡.该传感器显示其拉力F与作用点到O点距离x的变化关系如图所示.由图5可知金属杆重 N.
0 34123 34131 34137 34141 34147 34149 34153 34159 34161 34167 34173 34177 34179 34183 34189 34191 34197 34201 34203 34207 34209 34213 34215 34217 34218 34219 34221 34222 34223 34225 34227 34231 34233 34237 34239 34243 34249 34251 34257 34261 34263 34267 34273 34279 34281 34287 34291 34293 34299 34303 34309 34317 235360
①实验前,应先调节杠杆在

②某实验小组记录两组数据如下:
| 实验序号 | 动力F1/N | 动力臂L1/cm | 阻力F2/N | 阻力臂L2/cm |
| 1 | 2 | 20 | 1 | 10 |
| 2 | 1 | 8 | 2 | 4 |
③如图2所示,弹簧测力计在C处由竖直向上逐渐向右倾斜拉动杠杆,仍使杠杆在水平位置保持平衡,则弹簧测力计的示数将
④某次实验中,若采取如图3所示的方式悬挂钩码,杠杆也能在水平位置保持平衡(杠杆上每格等距),但老师却往往提醒大家不要采用这种方式,这主要是以下哪种原因
A.一个人无法独立操作 B.需要使用太多的钩码
C.力臂与杠杆不重合 D.力和力臂数目过多
⑤如图4所示,实验小组选用长1.6m、粗细均匀的一只金属杆,绕O点在竖直平面内自由转动,同时将一个“拉力--位移传感器”竖直作用在杆上,并使杠杆在水平位置始终保持平衡.该传感器显示其拉力F与作用点到O点距离x的变化关系如图所示.由图5可知金属杆重
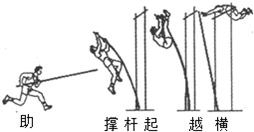 19、如图,表示撑杆跳高运动的儿个阶段:助跑、撑杆起跳、越横杆.在这几个阶段中能量的转化情况是:
19、如图,表示撑杆跳高运动的儿个阶段:助跑、撑杆起跳、越横杆.在这几个阶段中能量的转化情况是:
 如图所示,滑轮组将总重为5N的砝码匀速提升10cm,绳端受到的拉力F为
如图所示,滑轮组将总重为5N的砝码匀速提升10cm,绳端受到的拉力F为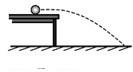 如图所示,有一重为100N的小球在桌面上滚动了10cm后滚出桌面,0.5s后落在离桌面边缘2m的地面上,桌面距离地面高度为1m.则小球在整个运动过程中,重力做了
如图所示,有一重为100N的小球在桌面上滚动了10cm后滚出桌面,0.5s后落在离桌面边缘2m的地面上,桌面距离地面高度为1m.则小球在整个运动过程中,重力做了