【题目】用电子秤、一个玻璃杯和水,可以粗略测量椰子油的密度。先后测出空杯,装满水、装满油的杯子的质量,数据如下表。杯子两次“装满”,是为了使被测量的油和水_______相同。根据测量数据计算,椰子油的密度是__________kg/m3。(ρ水=1.0×103kg/m3)

空杯的质量/g | 水和杯的质量/g | 油和杯的质量/g |
100 | 300 | 268 |


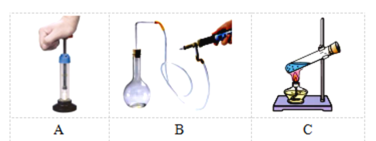
【题目】如图A是某品牌擦窗机器人(窗宝),它具有智慧运营系统。它拥有四组防跌落识别器,能够有效识别边框,可配合智能芯片巧妙避障,无框玻璃也可放心使用。擦除模式一般采用“N模式”,如图C所示为“N模式”的移动轨迹;图D为擦窗机器人部分参数

擦窗机器人部分参数 |
| |
额定电压(V) | 24 | |
额定总功率(W) (真空电动机和驱动电动机) | 60 | |
产品净重(kg) | 2 | |
产品尺寸(mm) | 250*250*115 | |
抹布与玻璃接触面积(mm2) | 30000 | |
真空度 | 3000Pa | |
D | E | |

(1)擦窗机器人采用吸盘真空泵,位于如图E处的“风机”处,形成一处较小的密闭空间,该处使擦窗机器人内外受到_________差,从而牢牢的吸在玻璃窗上。该处的真空度可达3000Pa(即内部气压为3000Pa),若机器人内吸盘的面积为30cm2,求密闭空间内气体对机器人的压力大小为多少______?
(2)图B中为擦窗机器人静止在窗户上,请作出此时它受到的摩擦力示意图。
(__________)
(3)正常工作中,电动机的工作效率为80%,则电动机工作10min会产生多少热量_______?
(4)擦窗机器人在擦窗过程中受驱动电动机驱动,若擦窗机器人在擦窗过程中受到的滑动摩擦力恒为100N,现有一扇窗户,其玻璃面高1.5m,宽1m,将机器人置于该玻璃上方一角,采用“N”型模式擦窗,擦除过程中水平方向和竖直方向均做匀速直线运动,且为了达到更好的净洁效果,每次单向擦窗时会覆盖原擦除面的50%。求擦窗机器人在移动擦完该窗过程中克服摩擦力做的功__________。
【题目】图甲是测量小灯泡(U额=2.5V)电功率的电路。电源电压恒为4V。

(1)请将图甲中的电路连接完整。(要求滑片P向右滑动时电灯变亮,导线不允许交叉)
(__________)
(2)实验中,闭合开关前,滑动变阻器的滑片P应移到最__________端(选填“左”、“右”)。
(3)小华同学连接好电路后,按正确的步骤进行实验。小灯泡正常发光时,电流表的示数如图乙所示,该示数为____A。小灯泡的额定功率为____W。
(4)小华同学所在小组记录了许多组电压U、电流I对应数据,然后画出小灯泡灯丝的U-I曲线,图中符合实际的是________。

(5)下表是另一组的小源同学用他设计的电路做实验时记录的电压表与电流表的读数,则小源同学测得的小灯泡的额定功率为_____W
实验次数 | 1 | 2 | 3 |
电压U/V | 2.5 | 2.0 | 1.5 |
电流I/A | 0.19 | 0.22 | 0.25 |
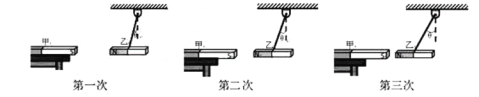
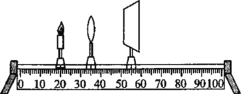
【题目】某同学用焦距为10cm的凸透镜做“探究凸透镜成像的规律”的实验:如图所示,依次将点燃的蜡烛、凸透镜、光屏放在光具座上,调节烛焰、凸透镜、光屏的中心,使三者大致在同一高度。下表是小江同学实验时记录的几组数据:
实验次数 | 物距u/cm | 像距v/cm |
1 | 30 | 15 |
2 | 20 | 20 |
3 | 15 | 30 |
4 | 5 | / |
(1)第3次实验时,像距为________cm;
(2)当光屏上得到了一个倒立缩小的实像时,这与_______(选填“照相机”“投影仪”或放大镜”)的原理相似。保持透镜的位置不变,要使屏上的像稍变大些,应将蜡烛________透镜,将光屏________透镜(填“靠近”或“远离”)。