 如图甲所示,用竖直悬挂的泡沫塑料球接触发声的音叉时,泡沫塑料球被弹起,这个现象说明声音是由物体振动产生的;假若在月球上用图乙做这个实验,根据你学过的物理知识判断一下,悬挂的小球不会(会/不会)被弹起,判断的依据是:声音不能在真空中传播.
如图甲所示,用竖直悬挂的泡沫塑料球接触发声的音叉时,泡沫塑料球被弹起,这个现象说明声音是由物体振动产生的;假若在月球上用图乙做这个实验,根据你学过的物理知识判断一下,悬挂的小球不会(会/不会)被弹起,判断的依据是:声音不能在真空中传播.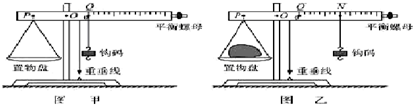
19.“探究杠杆的平衡条件”实验中,
(1)首先应调节杠杆两端的平衡螺母,使杠杆在水平位置平衡,这样做的好处:便于在杠杆上直接测量力臂.如发现杠杆左端偏高,则可将右端的平衡螺母向左调节.
(2)如图是小明同学实验的情景,实验时所用的每个钩码重均为0.5N,杠杆上刻线的间距为5cm,部分实验数据记录如中下表:
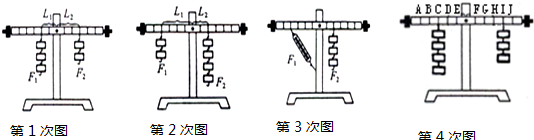
表格中空格里应记入的数据是15;小明的第3次实验存在错误,其错误是动力臂读错了.
(3)第4次测量中,如图所示的条件下杠杆已处于平衡状态,若小明分别拿走两边下方的两个钩码,则杠杆的左(“左”或“右”)端将下沉.为使杠杆恢复水平平衡,小明应将左侧剩余的两个钩码移至D点处.
0 187436 187444 187450 187454 187460 187462 187466 187472 187474 187480 187486 187490 187492 187496 187502 187504 187510 187514 187516 187520 187522 187526 187528 187530 187531 187532 187534 187535 187536 187538 187540 187544 187546 187550 187552 187556 187562 187564 187570 187574 187576 187580 187586 187592 187594 187600 187604 187606 187612 187616 187622 187630 235360
(1)首先应调节杠杆两端的平衡螺母,使杠杆在水平位置平衡,这样做的好处:便于在杠杆上直接测量力臂.如发现杠杆左端偏高,则可将右端的平衡螺母向左调节.
(2)如图是小明同学实验的情景,实验时所用的每个钩码重均为0.5N,杠杆上刻线的间距为5cm,部分实验数据记录如中下表:

| 实验次数 | 动力F1/N | 动力臂L1/cm | 阻力F2/N | 阻力臂L2/cm |
| 1 | 1.5 | 10 | 1 | |
| 2 | 1 | 20 | 2 | 10 |
| 3 | 1 | 20 | 1.5 | 10 |
(3)第4次测量中,如图所示的条件下杠杆已处于平衡状态,若小明分别拿走两边下方的两个钩码,则杠杆的左(“左”或“右”)端将下沉.为使杠杆恢复水平平衡,小明应将左侧剩余的两个钩码移至D点处.

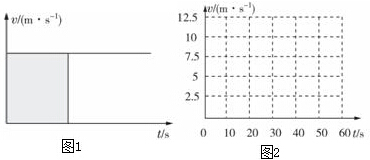
 小明在“测小车的平均速度”的实验中,设计了如图所示的实验装置:小车从带刻度(分度值为1cm)的斜面顶端由静止下滑,图中的圆圈是小车到达A、B、C三处时电子表的显示(数字分别表示“小时:分:秒”).
小明在“测小车的平均速度”的实验中,设计了如图所示的实验装置:小车从带刻度(分度值为1cm)的斜面顶端由静止下滑,图中的圆圈是小车到达A、B、C三处时电子表的显示(数字分别表示“小时:分:秒”).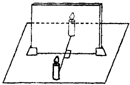 如图是探究平面镜成像特点的实验装置.
如图是探究平面镜成像特点的实验装置.