
 如图所示,小星的爸爸把电水壶的三线插头中间的铜片拆除,以便能在墙壁上的两孔插座上使用.这种使用方法是不安全(填“安全”或“不安全”)的,这样使用插头会使电水壶的外壳不能接地,容易出现触电事故.
如图所示,小星的爸爸把电水壶的三线插头中间的铜片拆除,以便能在墙壁上的两孔插座上使用.这种使用方法是不安全(填“安全”或“不安全”)的,这样使用插头会使电水壶的外壳不能接地,容易出现触电事故.
 如图所示,将体积为0.001m3的正方体木块,放入盛有水的水槽内.待木块静止时,其下表面距水面0.06m,已知容器与支持面的面积为200cm2,ρ水=1.0×103kg/m3,g取10N/kg,求:
如图所示,将体积为0.001m3的正方体木块,放入盛有水的水槽内.待木块静止时,其下表面距水面0.06m,已知容器与支持面的面积为200cm2,ρ水=1.0×103kg/m3,g取10N/kg,求:
9.以下微观粒子按空间尺度由大到小排序正确的是( )
| A. | 质子 原子核 原子 | B. | 原子 原子核 质子 | ||
| C. | 原子核 质子 原子 | D. | 原子 质子 原子核 |
8.2015年1月我国自行设计的“蛟龙号”载人潜水器(如图甲) 对印度洋进行深海探矿、海底高精度地形测量.“蛟龙号”的外壳选择了钛合金板作主材,其主要技术参数如下表.蛟龙号挂有适当数量的压载铁,可通过改变压载铁的数量,来控制其下沉或上浮.并采用科学家们研发的具有世界先进水平的高速水声通信技术,即声纳通信.
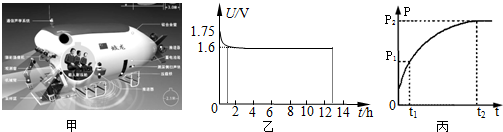
“蛟龙号”的电源是由多节充油银锌蓄电池串联而成.这种电源的“比能量”约为14kw•h/kg,“比能量”是指电池单位质量所输出的电能.每节这种蓄电池的放电电压随时间的变化规律如图乙,可以用60A的电流连续放电13h.
(1)在深海工作区内,“蛟龙号”与海面上工作人员联系时采用了电磁波传递信息.
(2)“蛟龙号”的外壳选择钛合金板,这主要是因为这种材料具有较大硬度.
(3)加速下沉的“蛟龙号”,若在经过某一密度均匀的海水区域时,迅速抛掉部分压载铁,使其所受浮力等于重力,不计水的阻力,则其将C
A.继续加速下沉 B.减速下沉 C.匀速下沉 D.立即静止
(4)“蛟龙号”采用“深潜器无动力下潜上浮技术”,它是靠改变自身重力来实现浮沉.当它悬停在工作区时,“蛟龙号”自身所受的浮力为5.046×105N.(设海水的密度ρ水=1×103kg/m3,g取10N/kg)
(5)“蛟龙号”工作时,需要的总能量约为112kW•h.则其电源的质量约为8kg,为了对“蛟龙号”正常供电,串联的蓄电池不得少于90节.
(6)“蛟龙号”完成任务,乘员取出载荷上岸后,“蛟龙号”漂浮在海面上,由起重装置将其匀速竖直吊离水面,起重装置起吊拉力的功率随时间变化的图象如图丙所示,图丙中P2=2P1.t1时刻“蛟龙号”的排水体积11m3 (不考虑水的阻力,g取10N/kg).
0 185037 185045 185051 185055 185061 185063 185067 185073 185075 185081 185087 185091 185093 185097 185103 185105 185111 185115 185117 185121 185123 185127 185129 185131 185132 185133 185135 185136 185137 185139 185141 185145 185147 185151 185153 185157 185163 185165 185171 185175 185177 185181 185187 185193 185195 185201 185205 185207 185213 185217 185223 185231 235360
| 自身体积/m3 | 50.46 | 最大速度/节 | 25 |
| 自身质量/kg | 2.2×104 | 最大载荷(不包括乘员体重)/kg | 220 |
| 最大下潜深度/m | 7000 | 乘员人数(每人体重不超过80kg) | 3 |

“蛟龙号”的电源是由多节充油银锌蓄电池串联而成.这种电源的“比能量”约为14kw•h/kg,“比能量”是指电池单位质量所输出的电能.每节这种蓄电池的放电电压随时间的变化规律如图乙,可以用60A的电流连续放电13h.
(1)在深海工作区内,“蛟龙号”与海面上工作人员联系时采用了电磁波传递信息.
(2)“蛟龙号”的外壳选择钛合金板,这主要是因为这种材料具有较大硬度.
(3)加速下沉的“蛟龙号”,若在经过某一密度均匀的海水区域时,迅速抛掉部分压载铁,使其所受浮力等于重力,不计水的阻力,则其将C
A.继续加速下沉 B.减速下沉 C.匀速下沉 D.立即静止
(4)“蛟龙号”采用“深潜器无动力下潜上浮技术”,它是靠改变自身重力来实现浮沉.当它悬停在工作区时,“蛟龙号”自身所受的浮力为5.046×105N.(设海水的密度ρ水=1×103kg/m3,g取10N/kg)
(5)“蛟龙号”工作时,需要的总能量约为112kW•h.则其电源的质量约为8kg,为了对“蛟龙号”正常供电,串联的蓄电池不得少于90节.
(6)“蛟龙号”完成任务,乘员取出载荷上岸后,“蛟龙号”漂浮在海面上,由起重装置将其匀速竖直吊离水面,起重装置起吊拉力的功率随时间变化的图象如图丙所示,图丙中P2=2P1.t1时刻“蛟龙号”的排水体积11m3 (不考虑水的阻力,g取10N/kg).
 小明利用图所示的滑轮组,将重为900N的物体从一楼匀速提升至六楼,所用的拉力为360N,重物上升速度为0.1m/s(已知每层楼高3m),求:
小明利用图所示的滑轮组,将重为900N的物体从一楼匀速提升至六楼,所用的拉力为360N,重物上升速度为0.1m/s(已知每层楼高3m),求: