4.酒精的密度是0.8×103kg/m3,那么下列说法中正确的是( )
| A. | 能装下0.5kg纯净水的瓶子一定能装下0.6kg酒精 | |
| B. | 能装下0.5kg酒精的瓶子一定能装下0.6kg纯净水 | |
| C. | 水和酒精的质量比是5:4 | |
| D. | 水和酒精的体积比是4:5 |
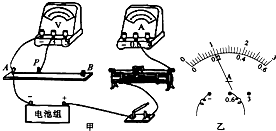 某实验小组进行“探究金属丝电阻大小与长度的关系”的实验,他们取一段粗细均匀的金属丝拉直连接在A、B接线柱上,在金属丝上安装一个可滑动的金属夹P.实验室还提供了下列器材:电压表、电流表、电池组(电压3V)、滑动变阻器(20Ω 2A)、刻度尺、开关和导线若干.
某实验小组进行“探究金属丝电阻大小与长度的关系”的实验,他们取一段粗细均匀的金属丝拉直连接在A、B接线柱上,在金属丝上安装一个可滑动的金属夹P.实验室还提供了下列器材:电压表、电流表、电池组(电压3V)、滑动变阻器(20Ω 2A)、刻度尺、开关和导线若干.
1.一无盖的瓶子内盛有水,要求不接触瓶子,能加快瓶中水面下降速度的办法中不可行的是( )
| A. | 用电扇向瓶口吹气 | |
| B. | 把一根两端开口的吸管插入水中,将上端管口用手指堵住,再提起来,将部分水取出 | |
| C. | 把一根两端开口的吸管插入水中,用另一根两端开口的吸管沿上端管口水平用力吹气 | |
| D. | 象乌鸦喝水那样向瓶中放入小石块,但水不溢出 |
14.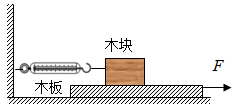 如图所示,木块与弹簧测力计相连,弹簧测力计水平固定,通过细绳用水平向右的拉力F拉动粗糙木板,使其水平向右运动,当木块静止不动时,与水平相连的弹簧测力计的示数不变,关于该状态下,下列说法正确的是( )
如图所示,木块与弹簧测力计相连,弹簧测力计水平固定,通过细绳用水平向右的拉力F拉动粗糙木板,使其水平向右运动,当木块静止不动时,与水平相连的弹簧测力计的示数不变,关于该状态下,下列说法正确的是( )
 如图所示,木块与弹簧测力计相连,弹簧测力计水平固定,通过细绳用水平向右的拉力F拉动粗糙木板,使其水平向右运动,当木块静止不动时,与水平相连的弹簧测力计的示数不变,关于该状态下,下列说法正确的是( )
如图所示,木块与弹簧测力计相连,弹簧测力计水平固定,通过细绳用水平向右的拉力F拉动粗糙木板,使其水平向右运动,当木块静止不动时,与水平相连的弹簧测力计的示数不变,关于该状态下,下列说法正确的是( )| A. | 当木板水平向右匀速运动时,若木块静止不动,木板对木块的摩擦力为静摩擦力 | |
| B. | 当木板水平向右匀速运动时,若木块静止不动,木板对木块的摩擦力为滑动摩擦力 | |
| C. | 无论木板水平向右匀速运动还是加速运动,若木块静止不动,弹簧测力计的示数都小于F | |
| D. | 无论木板水平向右匀速运动还是加速运动,若木块静止不动,弹簧测力计的示数都等于F |
 在如图所示的电路中,电源电压保持不变,开关S1始终闭合,当开关S2断开时,灯L1,L2是串联的;当开关S2闭合时,灯L2被短路,电压表的示数变大(选填“变大”、“变小”或“不变”),电流表的示数变大(选填“变大”、“变小”或“不变”).
在如图所示的电路中,电源电压保持不变,开关S1始终闭合,当开关S2断开时,灯L1,L2是串联的;当开关S2闭合时,灯L2被短路,电压表的示数变大(选填“变大”、“变小”或“不变”),电流表的示数变大(选填“变大”、“变小”或“不变”).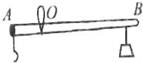 如图是小崔同学自制的杆秤,其中O点为提扭位置,经测量AO长为10cm,OB长为40cm,称砣重2N,秤盘重1N,则小崔自制的杠杆0刻度线距提纽5cm,该杆秤最多能称量7N重的物体,小粟同学认为该秤的最大称量太小,经认真思考,小粟认为不需要换用其他器材,只是在原有杆秤上稍作改动即可增大杆秤的最大称量值,她的方法是O点向左移动.
如图是小崔同学自制的杆秤,其中O点为提扭位置,经测量AO长为10cm,OB长为40cm,称砣重2N,秤盘重1N,则小崔自制的杠杆0刻度线距提纽5cm,该杆秤最多能称量7N重的物体,小粟同学认为该秤的最大称量太小,经认真思考,小粟认为不需要换用其他器材,只是在原有杆秤上稍作改动即可增大杆秤的最大称量值,她的方法是O点向左移动.
11.如图所示,小瑞用水平方向的推力推木箱,而木箱没有动,下列说法正确的是( )

0 184855 184863 184869 184873 184879 184881 184885 184891 184893 184899 184905 184909 184911 184915 184921 184923 184929 184933 184935 184939 184941 184945 184947 184949 184950 184951 184953 184954 184955 184957 184959 184963 184965 184969 184971 184975 184981 184983 184989 184993 184995 184999 185005 185011 185013 185019 185023 185025 185031 185035 185041 185049 235360

| A. | 小瑞对木箱的推力和木箱对小瑞的推力是一对平衡力 | |
| B. | 小瑞对木箱的推力与地面对木箱的阻力是相互作用的力 | |
| C. | 小瑞对木箱的推力小于木箱对小瑞的推力 | |
| D. | 小瑞对木箱的推力与地面对木箱的阻力是一对平衡力. |
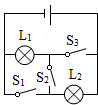 如图所示的电路中,闭合开关S1和S2,灯L2工作,闭合开关S2,灯L1和L2串联,请在图中标明L1和L2串联时,电流的流经途径和方向.
如图所示的电路中,闭合开关S1和S2,灯L2工作,闭合开关S2,灯L1和L2串联,请在图中标明L1和L2串联时,电流的流经途径和方向.