3.有一根镍铬合金丝,要使它接入电路的电阻变大,可以采取的方法有(不考虑温度变化)( )
| A. | 将这根合金丝对折后接入电路 | B. | 将这根合金丝拉长后接入电路 | ||
| C. | 提高合金丝两端的电压 | D. | 使通过这根合金丝的电流变小 |
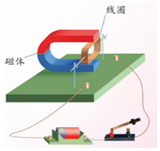 如图所示为小玲和小辉同学制作的一种直流电动机模型,他们用回形针做成两个支架,分别与电池的两极相连;用漆包线绕一个矩形线圈,以线圈引线为轴,并用小刀刮去轴的一端全部漆皮,另一端只刮去上半周漆皮,将线圈放在支架上,碲形磁体放在线圈周围.
如图所示为小玲和小辉同学制作的一种直流电动机模型,他们用回形针做成两个支架,分别与电池的两极相连;用漆包线绕一个矩形线圈,以线圈引线为轴,并用小刀刮去轴的一端全部漆皮,另一端只刮去上半周漆皮,将线圈放在支架上,碲形磁体放在线圈周围.
17.下列所示的工具中,在使用时属于费力杠杆的是( )
| A. |  | B. |  | C. |  | D. |  |
16. 阅读短文,回答问题.
阅读短文,回答问题.
扫地机器人 扫地机器人是一款能自动清扫地面的智能家用电器(如图甲所示).
机器人通过电动机旋转产生高速气流,将灰尘、杂物吸入集尘盒;其轮子的防滑皮采用凸凹材质制成;底部安装有塑料刷,用于清扫吸附在地板上的灰尘及轻小物体;前端装有感应器,通过发射、接收超声波或红外线来侦测障碍物.当剩余电量减为电池容量的20%时,机器人会主动寻找充电器充电.
机器人中吸尘电机的吸入功率、风量和真空度是衡量其优劣的重要参数.风量指单位时间内通过吸尘电机排出的空气体积.真空度指主机内部气压与外界的气压差.
下表为某扫地机器人的部分参数.
(1)机器人工作时,主机内部的气压小于(大于/小于/等于)大气压而产生吸力.
(2)下列说法中错误的是D
A.地面有静电时,轻小物体会吸附在地板上而不易清扫
B.当遇到玻璃门等透明障碍物时,使用红外线感应器效果较好
C.机器人工作时发出的声音不会对人的听力造成损伤
D.采用凸凹材质的轮皮,可增大机器人与地面间的摩擦
(3)若风量为0.015m3/s时,10min内通过吸尘电机排出的空气质量为11.7kg.(ρ空气=1.3kg/m3)
(4)光敏电阻是制作灰尘传感器的常用元件.图乙为某光敏电阻的控制电路,电源电压U0恒定,RG为光敏电阻,其阻值随空气透光程度的增大而增大,R0为定值电阻.当光敏电阻分别为6Ω和18Ω时,电压表的示数分别为6V和3V,则R0=6Ω.
(5)为监测空气的透光程度,现将电压表表盘的相关刻度值转化为表示空气中灰尘数目的刻度,则转化后表盘上指针偏转程度越大表示空气中灰尘数目越多(多/少).
0 176201 176209 176215 176219 176225 176227 176231 176237 176239 176245 176251 176255 176257 176261 176267 176269 176275 176279 176281 176285 176287 176291 176293 176295 176296 176297 176299 176300 176301 176303 176305 176309 176311 176315 176317 176321 176327 176329 176335 176339 176341 176345 176351 176357 176359 176365 176369 176371 176377 176381 176387 176395 235360
阅读短文,回答问题.扫地机器人 扫地机器人是一款能自动清扫地面的智能家用电器(如图甲所示).
机器人通过电动机旋转产生高速气流,将灰尘、杂物吸入集尘盒;其轮子的防滑皮采用凸凹材质制成;底部安装有塑料刷,用于清扫吸附在地板上的灰尘及轻小物体;前端装有感应器,通过发射、接收超声波或红外线来侦测障碍物.当剩余电量减为电池容量的20%时,机器人会主动寻找充电器充电.
机器人中吸尘电机的吸入功率、风量和真空度是衡量其优劣的重要参数.风量指单位时间内通过吸尘电机排出的空气体积.真空度指主机内部气压与外界的气压差.
下表为某扫地机器人的部分参数.
| 额定工作电压 | 12V | 额定功率 | 30W |
| 电池容量 | 2500mAh | 工作噪音 | <50dB |
(2)下列说法中错误的是D
A.地面有静电时,轻小物体会吸附在地板上而不易清扫
B.当遇到玻璃门等透明障碍物时,使用红外线感应器效果较好
C.机器人工作时发出的声音不会对人的听力造成损伤
D.采用凸凹材质的轮皮,可增大机器人与地面间的摩擦
(3)若风量为0.015m3/s时,10min内通过吸尘电机排出的空气质量为11.7kg.(ρ空气=1.3kg/m3)
(4)光敏电阻是制作灰尘传感器的常用元件.图乙为某光敏电阻的控制电路,电源电压U0恒定,RG为光敏电阻,其阻值随空气透光程度的增大而增大,R0为定值电阻.当光敏电阻分别为6Ω和18Ω时,电压表的示数分别为6V和3V,则R0=6Ω.
(5)为监测空气的透光程度,现将电压表表盘的相关刻度值转化为表示空气中灰尘数目的刻度,则转化后表盘上指针偏转程度越大表示空气中灰尘数目越多(多/少).
 如图是小磁针在通电螺线管旁静止时的情况,请画出螺线管的绕法和磁感线A的方向.
如图是小磁针在通电螺线管旁静止时的情况,请画出螺线管的绕法和磁感线A的方向.