 在如图所示的电路中,闭合开关S后,电流表A1、A2别为0.38A和0.7A,电压表的示数为4.5V.求:
在如图所示的电路中,闭合开关S后,电流表A1、A2别为0.38A和0.7A,电压表的示数为4.5V.求: 小园用滑动变阻器改变电路中的电流时,正确连接好如图所示的实物图,并画出与实物图相对应的电路图;在闭合开关前,同伴小苹提醒她图所画的电路图有不对应之处,
小园用滑动变阻器改变电路中的电流时,正确连接好如图所示的实物图,并画出与实物图相对应的电路图;在闭合开关前,同伴小苹提醒她图所画的电路图有不对应之处, 物理学中可以用f=μN计算滑动摩擦力的大小(f为摩擦力,N为正压力,μ为动摩擦系数).如图所示,以表面粗糙的木板固定在水平桌面上,木板上一质量为400g的滑块通过轻绳绕过动滑轮,绳的另一端悬挂托盘,已知托盘质量为50克,当添加的砝码质量达到50克时,滑块恰好做匀速直线运动.
物理学中可以用f=μN计算滑动摩擦力的大小(f为摩擦力,N为正压力,μ为动摩擦系数).如图所示,以表面粗糙的木板固定在水平桌面上,木板上一质量为400g的滑块通过轻绳绕过动滑轮,绳的另一端悬挂托盘,已知托盘质量为50克,当添加的砝码质量达到50克时,滑块恰好做匀速直线运动.
7.图为探究“杠杆的平衡条件”的实验装置.实验中:
(1)首先应调节杠杆两端的螺母,使杠杆在不挂钩码时处于水平平衡状态.这一调节过程的目的是为了使杠杆的自重对杠杆平衡不产生影响,这时杠杆重力的力臂为零.
(2)实验过程中,给杠杆两端挂上不同数量的钩码,移动钩码的位置,使杠杆保持水平平衡状态,这时就可读出相应的数据.当然也可通过移动钩码的位置使杠杆在倾斜状态下达到平衡,并进行相关数据的测量.但我们总是选取杠杆的水平平衡状态进行实验,其原因主要是便于测力臂.
(3)小明和同学们一起,进一步探究“杠杆平衡,阻力和阻力臂的乘积不变时,动力跟动力臂的关系”的实验.探究过程中,在杠杆左端某一固定位置挂一个重力G=2.5N的物体,在杠杆右端不同位置处施加不同的竖直向下力F,保证杠杆处于平衡状态.记录的数据如下表所示.
(a)请根据表中数据,画出动力F与动力臂倒数$\frac{1}{L}$的图象.
(b)由图象可得出:杠杆平衡,阻力和阻力臂的乘积不变时,F与L成反比.

(1)首先应调节杠杆两端的螺母,使杠杆在不挂钩码时处于水平平衡状态.这一调节过程的目的是为了使杠杆的自重对杠杆平衡不产生影响,这时杠杆重力的力臂为零.
(2)实验过程中,给杠杆两端挂上不同数量的钩码,移动钩码的位置,使杠杆保持水平平衡状态,这时就可读出相应的数据.当然也可通过移动钩码的位置使杠杆在倾斜状态下达到平衡,并进行相关数据的测量.但我们总是选取杠杆的水平平衡状态进行实验,其原因主要是便于测力臂.
(3)小明和同学们一起,进一步探究“杠杆平衡,阻力和阻力臂的乘积不变时,动力跟动力臂的关系”的实验.探究过程中,在杠杆左端某一固定位置挂一个重力G=2.5N的物体,在杠杆右端不同位置处施加不同的竖直向下力F,保证杠杆处于平衡状态.记录的数据如下表所示.
| 实验 | 第1次 | 第2次 | 第3次 | 第4次 | 第5次 |
| 动力F/N | 0.5 | 1.0 | 2.0 | 2.5 | 4.0 |
| 动力臂L/m | 0.4 | 0.2 | 0.1 | 0.08 | 0.05 |
(b)由图象可得出:杠杆平衡,阻力和阻力臂的乘积不变时,F与L成反比.
6.下列说法正确的是( )
0 175011 175019 175025 175029 175035 175037 175041 175047 175049 175055 175061 175065 175067 175071 175077 175079 175085 175089 175091 175095 175097 175101 175103 175105 175106 175107 175109 175110 175111 175113 175115 175119 175121 175125 175127 175131 175137 175139 175145 175149 175151 175155 175161 175167 175169 175175 175179 175181 175187 175191 175197 175205 235360
| A. | 弹簧测力计只能测量竖直方向上力的大小 | |
| B. | 使用测电笔时要用手接触笔尾金属体 | |
| C. | 验电器的工作原理是异种电荷相互吸引 | |
| D. | 内燃机在做功冲程中把机械能转化为内能 |
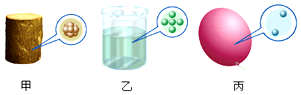 如图所示是物质三种状态的分子模型.某物质由图丙状态直接变为图甲状态时,下列事例中所发生的物态变化与之相同的是(3)(填序号).
如图所示是物质三种状态的分子模型.某物质由图丙状态直接变为图甲状态时,下列事例中所发生的物态变化与之相同的是(3)(填序号).