

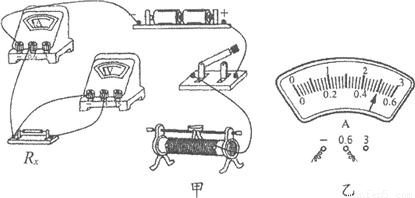
用“伏安法”测电阻,小华实验时的电路如图甲所示.
(1)请用笔画线代替导线,将实物电路连接完整.
(2)正确连接电路后.闭合开关前滑片p应置于滑动变阻器的______端(选填“左”或“右”).
(3)测量时,当电压表的示数为2.4V时,电流表的示数如图乙所示,则I=______A,根据实验数据可得Rx=______Ω.
(4)如果身边只有一只电流表或电压表,利用一已知阻值为R的定值电阻、开关、导线、电源等器材也可以测出未知电阻Rx.请仿照表中示例,设计测量Rx阻值的其他方法.
(1)请用笔画线代替导线,将实物电路连接完整.
(2)正确连接电路后.闭合开关前滑片p应置于滑动变阻器的______端(选填“左”或“右”).
(3)测量时,当电压表的示数为2.4V时,电流表的示数如图乙所示,则I=______A,根据实验数据可得Rx=______Ω.

(4)如果身边只有一只电流表或电压表,利用一已知阻值为R的定值电阻、开关、导线、电源等器材也可以测出未知电阻Rx.请仿照表中示例,设计测量Rx阻值的其他方法.
| 实验电路图 | 测量的物理量及RX的表达式 | |
| 示例 | 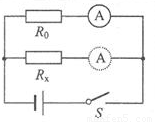 | (1)将电流表与R串联,测出通过R的电流I; (2)将电流表与RX串联,测出通过RX的电流IX. (3)RX=  |
| 你设计的方法 |
在探究“杠杆平衡条件”的实验中:
(1)某同学将杠杆悬挂起来,发现杠杆的右端低,左端高,他应该将杠杆两端的平衡螺母向______调节,使杠杆在______位置平衡.
(2)在杠杆两端挂钩码,不断改变动力或动力臂的大小,调节阻力或阻力臂的大小,使杠杆在原来的位置重新平衡,记录数据如下表:
根据表中的数据你得出杠杆的平衡条件是:______.
(3)根据第2次实验数据有同学得出杠杆的平衡条件是:动力+动力臂=阻力+阻力臂.他得出此错误结论的原因是:______.
0 102852 102860 102866 102870 102876 102878 102882 102888 102890 102896 102902 102906 102908 102912 102918 102920 102926 102930 102932 102936 102938 102942 102944 102946 102947 102948 102950 102951 102952 102954 102956 102960 102962 102966 102968 102972 102978 102980 102986 102990 102992 102996 103002 103008 103010 103016 103020 103022 103028 103032 103038 103046 235360
(1)某同学将杠杆悬挂起来,发现杠杆的右端低,左端高,他应该将杠杆两端的平衡螺母向______调节,使杠杆在______位置平衡.
(2)在杠杆两端挂钩码,不断改变动力或动力臂的大小,调节阻力或阻力臂的大小,使杠杆在原来的位置重新平衡,记录数据如下表:
| 实验次序 | 动力F1/N | 动力臂L1/cm | 阻力F2/N | 阻力臂L2/cm |
| 1 | 2.0 | 5 | 1.0 | 10 |
| 2 | 2.0 | 10 | 2.0 | 10 |
| 3 | 3.0 | 10 | 2.0 | 15 |
(3)根据第2次实验数据有同学得出杠杆的平衡条件是:动力+动力臂=阻力+阻力臂.他得出此错误结论的原因是:______.
