



“测量小灯泡电功率”的实验中,已知电源电压为3V,小灯泡的额定电压为2.5V.
(1)在甲图中还有一根导线没有连接好,请把它连接好,要求:滑动变阻器滑片P向右移动灯泡变暗.
(2)闭合开关前,应先将滑动变阻器的滑片移到______端(选填“A”或“B”).闭合开关后,发现小灯泡不亮,电流表指针偏转,电压表示数为零,产生故障的原因可能是______.
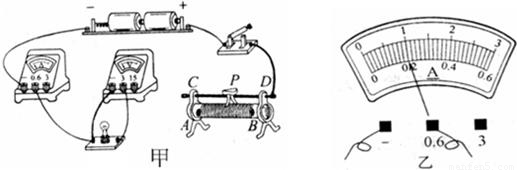
(3)排除故障后,实验得到的数据如下表.在第1次实验中,小灯泡两端电压为2V时,电流表示数如图乙所示,则通过小灯泡的电流为______A,此时小灯泡的实际功率为______W.
(4)由上表可知,小灯泡的额定功率为______W.
(5)某同学根据测出的三组数据求出各次电阻,发现灯泡不同电压下的电阻值不同,这是因为灯泡的电阻值与______有关.
0 101947 101955 101961 101965 101971 101973 101977 101983 101985 101991 101997 102001 102003 102007 102013 102015 102021 102025 102027 102031 102033 102037 102039 102041 102042 102043 102045 102046 102047 102049 102051 102055 102057 102061 102063 102067 102073 102075 102081 102085 102087 102091 102097 102103 102105 102111 102115 102117 102123 102127 102133 102141 235360
(1)在甲图中还有一根导线没有连接好,请把它连接好,要求:滑动变阻器滑片P向右移动灯泡变暗.
(2)闭合开关前,应先将滑动变阻器的滑片移到______端(选填“A”或“B”).闭合开关后,发现小灯泡不亮,电流表指针偏转,电压表示数为零,产生故障的原因可能是______.

(3)排除故障后,实验得到的数据如下表.在第1次实验中,小灯泡两端电压为2V时,电流表示数如图乙所示,则通过小灯泡的电流为______A,此时小灯泡的实际功率为______W.
| 实验次数 | 电压表示数U/V | 电流表示数I/A | 小灯泡电功率P/W |
| 1 | 2.0 | ||
| 2 | 2.5 | 0.22 | 0.55 |
| 3 | 2.8 | 0.24 | 0.67 |
(5)某同学根据测出的三组数据求出各次电阻,发现灯泡不同电压下的电阻值不同,这是因为灯泡的电阻值与______有关.
