

“测量小灯泡电功率”的实验中,已知电源电压为3V,小灯泡的额定电压为2.5V.
(1)在甲图中还有一根导线没有连接好,请把它连接好,要求:滑动变阻器滑片P向右移动灯泡变暗.
(2)闭合开关前,应先将滑动变阻器的滑片移到______端(选填“A”或“B”).闭合开关后,发现小灯泡不亮,电流表指针偏转,电压表示数为零,产生故障的原因可能是______.
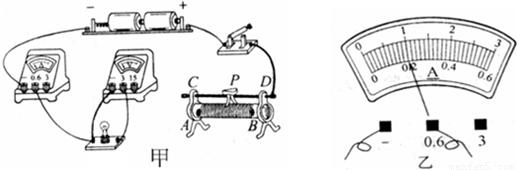
(3)排除故障后,实验得到的数据如下表.在第1次实验中,小灯泡两端电压为2V时,电流表示数如图乙所示,则通过小灯泡的电流为______A,此时小灯泡的实际功率为______W.
(4)由上表可知,小灯泡的额定功率为______W.
(5)某同学根据测出的三组数据求出各次电阻,发现灯泡不同电压下的电阻值不同,这是因为灯泡的电阻值与______有关.
(1)在甲图中还有一根导线没有连接好,请把它连接好,要求:滑动变阻器滑片P向右移动灯泡变暗.
(2)闭合开关前,应先将滑动变阻器的滑片移到______端(选填“A”或“B”).闭合开关后,发现小灯泡不亮,电流表指针偏转,电压表示数为零,产生故障的原因可能是______.

(3)排除故障后,实验得到的数据如下表.在第1次实验中,小灯泡两端电压为2V时,电流表示数如图乙所示,则通过小灯泡的电流为______A,此时小灯泡的实际功率为______W.
| 实验次数 | 电压表示数U/V | 电流表示数I/A | 小灯泡电功率P/W |
| 1 | 2.0 | ||
| 2 | 2.5 | 0.22 | 0.55 |
| 3 | 2.8 | 0.24 | 0.67 |
(5)某同学根据测出的三组数据求出各次电阻,发现灯泡不同电压下的电阻值不同,这是因为灯泡的电阻值与______有关.

为创建全国“环保节能模范城市”,新建的小区将普遍安装太阳能路灯.如图甲所示是某型号太阳能路灯,图乙是它的结构示意图,图丙是该太阳能路灯的技术参数.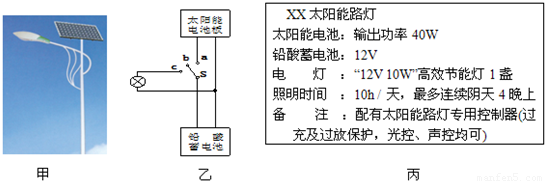
(1)太阳能路灯专用控制器实质上是一个由光、声音和时间控制的单刀多掷开关如图乙中的S.晚上要让电灯发光,控制器将控制开关S与______触点接触;铅酸蓄电池在充电过度或放电过度的情况下均会缩短使用寿命,为了避免铅酸蓄电池过充或过放,控制开关S与______触点接触即可.
(2)铅酸蓄电池最多能储存多少千瓦时的电能?
(3)如果太阳光照射到地面时的辐射功率为1000J/(每一秒钟辐射在每1平方米上的光能为1000J),太阳能电池光电转换率为8%,则太阳能电池板的面积为多大?

| XX太阳能路灯 太阳能电池:输出功率 40W 铅酸蓄电池:12V 电灯:“12V 10W“高效节能灯1盏 照明时间:10h/天,最多连续阴天4晚上 备注:配有太阳能路灯专用控制器(过 充分过放保护,光控、声控均可) |
(2)铅酸蓄电池最多能储存多少千瓦时的电能?
(3)如果太阳光照射到地面时的辐射功率为1000J/(每一秒钟辐射在每1平方米上的光能为1000J),太阳能电池光电转换率为8%,则太阳能电池板的面积为多大?
电动自行车以其轻便、经济、环保倍受消费者青睐.某型号电动自行车的主要技术参数如右表所示.
(1)小明质量为60kg,重力为多大?(g取10N/kg)
(2)小明骑上电动自行车行驶时两轮胎与地面的接触面积共为1.0×10-2m2,那么此时______车对地面的压强多大?(g取10N/kg)
(3)在某平直路段上,电动自行车以额定功率匀速行驶时,受到的平均阻力为40N.若行驶速度为7m/s,则5s内动力对自行车所做的功是多少?电动自行车的效率是多大?

0 100292 100300 100306 100310 100316 100318 100322 100328 100330 100336 100342 100346 100348 100352 100358 100360 100366 100370 100372 100376 100378 100382 100384 100386 100387 100388 100390 100391 100392 100394 100396 100400 100402 100406 100408 100412 100418 100420 100426 100430 100432 100436 100442 100448 100450 100456 100460 100462 100468 100472 100478 100486 235360
| 型号 | TDR0178Z |
| 无刷电机 | 48V 400W |
| 铅蓄电池 | 48V 80Ah |
| 整车质量 | 80Kg |
| 外包尺寸 | 1860mm×530mm×1050mm |
(2)小明骑上电动自行车行驶时两轮胎与地面的接触面积共为1.0×10-2m2,那么此时______车对地面的压强多大?(g取10N/kg)
(3)在某平直路段上,电动自行车以额定功率匀速行驶时,受到的平均阻力为40N.若行驶速度为7m/s,则5s内动力对自行车所做的功是多少?电动自行车的效率是多大?
