题目内容
【题目】探究杠杆的平衡条件:
【提出问题】如图1所示,是一种常见的杠秤,此时处于水平位置平衡.
发现一:小明在左侧挂钩上增加物体,可观察到提纽左侧下沉,他认为改变杠杆的水平平衡可以通过改变作用在杠杆上的 来实现;
发现二:接着小新移动秤砣使其恢复水平位置平衡,说明通过改变 的长短也可以改变杠杆的平衡.
那么,杠杆在满足什么条件时才平衡呢?
【制定计划与设计实验】
实验前,轻质杠杆处于如图2所示的状态,使用时,首先应将杠杆的平衡螺母向 (选填“左”或“右”)调节,使杠杆处于水平位置平衡,这样做的好处是 .
【实验结论】
如图3所示,他们进行了三次实验,对实验数据进行分析,得出杠杆的平衡条件是 .
【拓展应用】
如图4所示,是用手托起重物的示意图,图中前臂可以看作是一个 杠杆(选填“省力”、“费力”或“等臂”).假如托起6N的重物,请你根据图4所示,估算出手臂要用的动力大约是 N.
【答案】力;力臂;右;便于测量力臂,并能消除杠杆自身重力的影响;F1L1=F2L2;费力;48
【解析】解:【提出问题】小明在左侧挂钩上增加物体,改变了杠杆所受的力,改变了杠杆的平衡;
小新移动秤砣改变秤砣对杆力的力臂,使其恢复水平位置平衡,说明通过改变力臂的长短也可以改变杠杆的平衡;
【制定计划与设计实验】图2可知,杠杆的右端上翘,应将杠杆的平衡螺母向右调节,使杠杆处于水平位置平衡,这样做便于测量力臂,并能消除杠杆自身重力的影响;
【实验结论】图3,设每个钩码的重力为G,每个小格的长度为L,分析三次实验,甲图:3G×3L=3G×3L;
乙图:3G×2L=2G×3L;丙图:4G×L=2G×2L;可得杠杆的平衡条件是:F1L1=F2L2;
【拓展应用】图4中,支点在C点,做出杠杆所受的力及对应的力臂,如下图: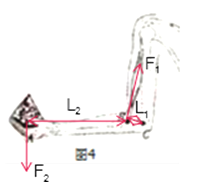
由图知,动力臂小于阻力臂,根据杠杆平衡条件,动力大于阻力,为费力杠杆;
由图知,阻力臂大约为动力臂的8倍,根据杠杆平衡条件:
F1=![]() =8F2=8×6N=48N.
=8F2=8×6N=48N.
故答案为:【提出问题】力;力臂;
【制定计划与设计实验】右;便于测量力臂,并能消除杠杆自身重力的影响;
【实验结论】F1L1=F2L2;
【拓展应用】费力;C;48.
【提出问题】根据杠杆的平衡条件:F1L1=F2L2 , 改变杠杆所受的力及其力臂,都可以改变力和力臂的乘积;
【制定计划与设计实验】实验中为了便于测量力臂,消除杠杆自身重力对实验的影响,应调节杠杆在水平位置平衡,调节时,需将平衡螺母向上翘的一端一端;
【实验结论】分析三幅图中力和对应力臂的关系,得出杠杆的平衡条件F1L1=F2L2;
【拓展应用】做出动力臂和阻力臂,根据力臂的关系判断杠杆的省力情况;
确定支点,估计动力臂和阻力臂的关系,根据杠杆的平衡条件估算出动力的大小.



【题目】实验:测量小灯泡的电功率
【实验器材】额定电压为2.5V的小灯泡(正常发光时电阻约为6Ω)、滑动变阻器(“10Ω 2A”)、新干电池两节、开关、导线若干等.
【实验步骤】
(1)如图甲所示的实物连接中,连接不妥之处为 ;
(2)闭合开关后,若出现下表所述的现象,请在表中空格处填写可能的原因:
现象 | 电灯的亮暗 | 电流表 | 电压表 | 可能的原因 |
1 | 亮 | 有示数 | 无示数 | |
2 | 不亮 | 无示数 | 有示数 |
(3)排除故障后,当移动滑片P到某位置时,电压表示数如图乙所示,若要测量小灯泡的额定功率,此时应在此位置基础上将滑片P向 (选填“左”或“右”)移动,使电压表的示数为 V,此时电流表的示数如图丙所示,则小灯泡的额定功率是 W.