题目内容
2.2015 年12月,大型全通透载客潜水器“寰岛蛟龙1”号在三亚下水.该观光潜水器最大下潜深度40米,未搭乘乘客时的质量为23.9吨,可搭载9名乘员,配备供电、浮力调节、生命支持等控制系统.
(1)潜水器下水探秘的深度不能过深的原因是:潜水器下水探秘的深度的深度越大,受到的压强越大,如果超过了潜水器所承受的压强,潜水器会被损坏.
(2)若潜水器潜入水中时排开水的体积为125m3,潜水器载满人时人的总质量为500Kg,求潜水器潜入水中受到的浮力为1.25×106N.(ρ海水=1.0×103千克/立方米)
(3)若潜水器在水下运动时,所受海水阻力与速度的关系如图所示,求潜水器在水下以0.4 米/秒的水平速度匀速运动10秒时,机器人水平推力所做的功是多少?
分析 (1)液体压强随着深度的增加而增大;
(2)利用F浮=ρgV排计算潜水器潜入水中受到的浮力;
(3)从潜水器所受海水阻力与速度的关系图象中读出潜水器在水下以0.4 米/秒的水平速度匀速运动时受到的阻力,利用二力平衡条件求出推力,利用速度公式求出距离,再利用W=Fs计算机器人水平推力所做的功.
解答 解:(1)因为液体压强随着深度的增加而增大,潜水器下水探秘的深度的深度越大,受到的压强越大,如果超过了潜水器所承受的压强,潜水器会被损坏,所以潜水器下水探秘的深度不能过深;
(2)潜水器潜入水中受到的浮力:
F浮=ρgV排=1.0×103kg/m3×10N/kg×125m3=1.25×106N;
(3)由潜水器所受海水阻力与速度的关系图象可知,潜水器在水下以0.4 米/秒的水平速度匀速运动时受到的阻力为f=140N,
潜水器在水下匀速运动时,机器人水平推力与受到的阻力是一对平衡力,
所以F=f=140N,
根据v=$\frac{s}{t}$可得,机器人运动的路程:
s=vt=0.4m/s×10s=4m,
机器人水平推力所做的功:
W=Fs=140N×4m=560J.
故答案为:
(1)潜水器下水探秘的深度的深度越大,受到的压强越大,如果超过了潜水器所承受的压强,潜水器会被损坏;
(2)1.25×106N;
(3)机器人水平推力所做的功560J.
点评 此题考查液体压强的特点、浮力的大小计算、速度公式及其应用、二力平衡条件及其应用、功的计算,关键是从图象中潜水器在水下以0.4 米/秒的水平速度匀速运动时受到的阻力,并根据二力平衡条件得出推力大小.

练习册系列答案
相关题目

13.为了探究声的产生条件,有人建议利用以下几个实验现象.你认为,能说明声的产生条件的实验现象是( )
甲、放在钟罩内的闹钟正在响铃,把钟罩内的空气抽去一些后,铃声明显减小.
乙、使正在发声的音叉接触水面,水面溅起水花.
丙、吹笛子时,手指按住不同的孔便会发出不同的声音.
丁、在吊着的大钟上固定一支细小的笔,把钟敲响后,用纸在笔尖上迅速拖过,可以在纸上画出一条来回弯曲的细线.
甲、放在钟罩内的闹钟正在响铃,把钟罩内的空气抽去一些后,铃声明显减小.
乙、使正在发声的音叉接触水面,水面溅起水花.
丙、吹笛子时,手指按住不同的孔便会发出不同的声音.
丁、在吊着的大钟上固定一支细小的笔,把钟敲响后,用纸在笔尖上迅速拖过,可以在纸上画出一条来回弯曲的细线.
| A. | 乙、丁 | B. | 丙、丁 | C. | 甲、乙 | D. | 甲、乙、丁 |




17.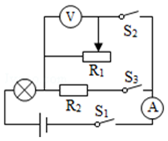 如图电路,灯泡标有“12V 6W”,滑动变阻器R1标有“100Ω 1A”,电压表量程为0~15V,电流表量程为0~0.6A,只闭合开关S1,S2,滑动变阻器连入电路阻值为16Ω时,灯正常发光;只闭合S1,S3,A示数为0.2A,忽略温度对灯丝电阻的影响,下列说法不正确的是( )
如图电路,灯泡标有“12V 6W”,滑动变阻器R1标有“100Ω 1A”,电压表量程为0~15V,电流表量程为0~0.6A,只闭合开关S1,S2,滑动变阻器连入电路阻值为16Ω时,灯正常发光;只闭合S1,S3,A示数为0.2A,忽略温度对灯丝电阻的影响,下列说法不正确的是( )
如图电路,灯泡标有“12V 6W”,滑动变阻器R1标有“100Ω 1A”,电压表量程为0~15V,电流表量程为0~0.6A,只闭合开关S1,S2,滑动变阻器连入电路阻值为16Ω时,灯正常发光;只闭合S1,S3,A示数为0.2A,忽略温度对灯丝电阻的影响,下列说法不正确的是( )| A. | 电源电压为20V | |
| B. | 只闭合S1,S2时,为了保护元件的安全,滑动变阻器连入电路的阻值范围是16Ω-72Ω | |
| C. | 只闭合S1,S2时,灯泡的最小功率为0.375W | |
| D. | R2的阻值为76Ω |

4. 某科学兴趣小组同学为探究电阻与导线长度的关系,设计了如图所示电路.已知长1米,横截面积1毫米2的铜等金属材料的电阻(20℃时)如下表.
某科学兴趣小组同学为探究电阻与导线长度的关系,设计了如图所示电路.已知长1米,横截面积1毫米2的铜等金属材料的电阻(20℃时)如下表.
请回答:
(1)该实验中的主要变量是材料.
(2)在应选用哪些材质的导线做被测导线时,小组同学产生了分歧,经过讨论最终确定被测导线应选镍铬合金线,原因是在长度、横截面积、温度相同时,镍铬合金丝的电阻较大.
某科学兴趣小组同学为探究电阻与导线长度的关系,设计了如图所示电路.已知长1米,横截面积1毫米2的铜等金属材料的电阻(20℃时)如下表. | 材料 | 电阻(欧) | 材料 | 电阻(欧) |
| 铜 | 0.0175 | 镍铬合金 | 1.0 |
| 铝 | 0.029 | 铁 | 0.10 |
(1)该实验中的主要变量是材料.
(2)在应选用哪些材质的导线做被测导线时,小组同学产生了分歧,经过讨论最终确定被测导线应选镍铬合金线,原因是在长度、横截面积、温度相同时,镍铬合金丝的电阻较大.