题目内容
在“探究杠杆的平衡条件”实验中,应先调节杠杆两端的平衡螺母,使杠杆在________位置平衡;如发现杠杆左端偏高,则可将平衡螺母向________调节.如图是小明同学三次实验的情景,实验时所用的每个钩码重0.5N,杠杆上每一格长5cm,部分实验数据已记录在上表中.
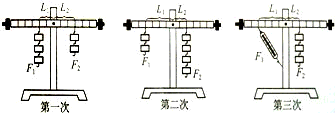
(1)请将表格中的实验数据补充完整.
| 实验次数 | 动力F1/N | 动力臂L1/cm | 阻力F2/N | 阻力臂L2/cm |
| 1 | 1.5 | 10 | 1 | |
| 2 | 1 | 20 | 10 | |
| 3 | 1 | 20 | 1.5 | 10 |
(3)在探究杠杆平衡条件的实验中,多次改变力和力臂的大小主要是为了________.
A.减小摩擦 B.使每组数据更准确
C.多次测量取平均值减小误差 D.获取多组实验数据归纳出物理规律.
 解:杠杆在水平位置平衡,是为了便于在杠杆上读出动力臂和阻力臂.
解:杠杆在水平位置平衡,是为了便于在杠杆上读出动力臂和阻力臂.杠杆左端上翘,要使杠杆在水平位置平衡,平衡螺母向上翘的左端移动.
(1)实验1,因为F1l1=F2l2,所以,1.5N×10cm=1N×l2,所以,l1=15cm.
实验2,因为,F'1l'1=F'2l'2,所以,1N×20cm=F'2×10cm,所以,F'2=2N.
(2)弹簧测力计倾斜拉,动力臂是如图红色的,没有在杠杆上,动力臂测量错误.
(3)探究杠杆平衡条件的实验要完成多次测量是为了获取多组数据归纳物理规律,得出普遍性的结论.
故答案为:水平;左;(1)15;2;(2)动力臂测量错误;(3)D.
分析:探究杠杆平衡条件时,使杠杆在水平位置平衡,是为了便于在杠杆上读出动力臂和阻力臂.
要使杠杆在水平位置平衡,平衡螺母向上翘的一端移动.
每一次实验都根据杠杆平衡条件F1l1=F2l2得出缺少的数据.
小明的第3次实验,弹簧测力计倾斜拉弹簧测力计,动力臂没有在杠杆上,但是读动力臂时,读的是支点到动力点的距离,是错误的.
探究杠杆平衡条件的实验要完成多次测量是为了获取多组数据,得出普遍性的结论.
点评:在探究杠杆平衡条件时,使杠杆在水平位置平衡,是为了便于在杠杆上读出动力臂和阻力臂.
杠杆的水平位置平衡调节和天平的平衡调节性质是相同的.
杠杆平衡条件是杠杆平衡计算的基础内容,一定要掌握.

练习册系列答案
 世纪百通期末金卷系列答案
世纪百通期末金卷系列答案
相关题目


甲乙两个实验小组在探究“杠杆的平衡条件”时,分别得到下面两组数据和结论
| 甲 组 | |||||
| 次数 | 动力 | 动力臂 | 阻力 | 阻力臂 | |
| 1 | 7 | 4 | 2 | 14 | |
| 2 | 6 | 4 | 8 | 3 | |
| 3 | 4 | 5 | 2 | 10 | |
| 结论 | 动力*动力臂=阻力*阻力臂 | ||||
| 乙 组 | |||||
| 次数 | 动力 | 动力臂 | 阻力 | 阻力臂 | |
| 1 | 3 | 4 | 4 | 3 | |
| 2 | 4 | 5 | 5 | 4 | |
| 结论 | 动力+动力臂=阻力+阻力臂 | ||||
他们在交流时,乙组发现了自己实验结论的错误和出现错误的原因。你认为乙组出现错误的原因有哪些?请找出两条.
原因①:________________________________________________________________.
原因②:________________________________________________________________.

