题目内容
【题目】2019年1月3日10时26分,嫦娥四号探测器首次在月球背面成功着陆,并通过“鹊桥”中继卫星传回了世界第一张近距离拍摄的月背影像图,开启了人类月球探测新篇章。嫦娥四号探测器由着陆器和巡视器组成,在第二个月昼里,嫦娥四号着陆器矗立月面,巡视器立于着陆器顶部,展开太阳翼。随后,着陆器正常解锁,在着陆器与月面间搭起一架斜梯巡视器沿斜梯缓缓走向月面,实现了着陆器与巡视器的成功分离,巡视器玉兔二号顺利驶抵月背,在月背留下第一道印迹。玉兔二号携带的全景相机,对月球背面进行了环拍,获得了彩色全景图,通过“鹊桥”中继星传回地面。

(1)当“巡视器玉兔二号”缓缓驶离“着陆器”的过程中,以着陆器为参照物,“玉兔二号”月球车是_____(选填“运动”或“静止”)的。
(2)嫦娥四号着陆器矗立月面,巡视器立于着陆器顶部,展开太阳翼,此时将太阳能转化为_____能。
(3)“玉兔二号”月球车上安装有全景相机,拍摄的月背影像图是由中继卫星通过_____(选填“电磁波”或“超声波”)传回地面的。
(4)嫦娥四号探测器顺利进入环月轨道,在绕月球飞行的过程中,它的运动状态_____(选填“会”或“不会”)发生改变。
【答案】运动 电 电磁波 会
【解析】
第一空.当“巡视器玉兔二号”缓缓驶离“着陆器”的过程中,“玉兔二号”与着陆器之间的位置不断发生变化,以着陆器为参照物,“玉兔二号”月球车是运动的;
第二空.太阳能帆板的作用是将太阳能转化为电能;
第三空.月球上没有空气,声音无法传播,因此月球车把月球上获取的信息通过无线电波传输到地球上;
第四空.嫦娥四号探测器在绕月球飞行的过程中,它的运动方向时刻在变,所以运动状态在改变。

 开心快乐假期作业暑假作业西安出版社系列答案
开心快乐假期作业暑假作业西安出版社系列答案 名题训练系列答案
名题训练系列答案 期末集结号系列答案
期末集结号系列答案
【题目】阅读短文,回答问题。
“无人机”(多功能飞行器)可通过无线电进行操控,其在拍摄调查、无人配送等方面具有广阔的前景。某品牌“无人机”由锂电池供电,采用4个电机带动旋翼转动,对下方空气施力的同时获得升力。该无人机设有一键起降和返航、空中悬停等功能,其携带的摄像机可以进行高清拍摄并实时把信号传到遥控器显示器,下表是该无人机的部分参数:
无人机质量(含摄像机 | 1.5kg | 锂电池额定电压 | 12V |
最大上升速度 | 6m/s | 电动机工作电压 | 10V |
最大水平速度 | 15m/s | 每个电动机最大输出功率 | 50W |
最大上升速度时受到的空气阻力 | 9N | 电动机的能量转化效率 | 95% |
(1)当“无人机”携带摄像机飞行在空中进行拍摄地面图像时,下列说法中错误的是(________)
A.“无人机”升空时,获得升力的施力物体是空气
B.“无人机”中的电动机工作原理是磁场对电流的作用
C.“无人机”在拍摄地面图像时增加悬停高度可以使所成的像变大
D.“无人机”升空过程中所受到的大气压变小
(2)为了保证电动机正常工作,通过电子调速器(简称电调)来控制电动机的电流从而改变电动机的功率,每一个电动机连接一个电调,那么电动机和电调的连接方式是________(选填“串联”或“并联”)。
(3)已知“无人机”上升时受到空气的阻力与上升速度的平方成正比。该“无人机”携带摄像机参与某次火情的勘测时,“无人机”以4m/s的速度从地面匀速竖直升空至100m高处,然后悬停观测(整个过程4个电动机同时工作)。此时,“无人机”上升时受到的空气阻力________N。“无人机”上升过程中电动机消耗的电能为________J。(g=10N/kg)
(4)该“无人机”携带的微型摄像机带有自动拍摄功能,未出现火情时处于待机状态,等到火情来临时产生一定强度的红外线,摄像机将自主启动进入工作状态。小明利用红外探测器设计了一个“模拟自启系统”,如图甲所示。该系统由“自启电路”、“控制电路”等组成。其中电源由“无人机”锂电池提供,R是电阻箱, RP是红外探测器,可视为可变电阻,它的阻值与红外线强度变化的对应关系如下表所示。(E为红外线强度,cd表示其单位)
E/cd | 1 | 2 | 3 | 4 | 6 |
RP/Ω | 18 | 9 | 6 | 4.5 | 3 |
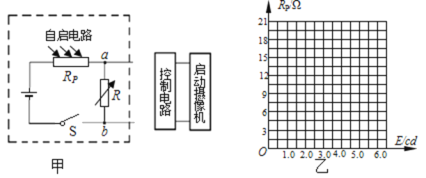
①表中数据,请在图乙坐标中描点做出RP-E 的关系图线
(_____)
②a、b两端电压必须等于或大于9V时,控制电路才能启动摄像机进入工作状态。小明设定红外线强度为4.5cd时启动摄像机工作,电阻箱的阻值至少应调到________Ω。
③为了能使控制电路在红外线强度较弱时就能启动摄像机进入工作状态,可采取的措施:一是________(选填“调高”或“调低”))电阻箱R的电阻值;二是________(选填“调高”或“调低”)开电源的电压值。