题目内容
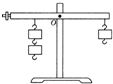 如图,在探究“杠杆平衡条件”实验后,同学们交流讨论,下列同学的发言正确的是
如图,在探究“杠杆平衡条件”实验后,同学们交流讨论,下列同学的发言正确的是
 如图,在探究“杠杆平衡条件”实验后,同学们交流讨论,下列同学的发言正确的是
如图,在探究“杠杆平衡条件”实验后,同学们交流讨论,下列同学的发言正确的是- A.调节横梁平衡后,在测量过程中,还可以调节平衡螺母
- B.该实验可得出结论:当阻力和阻力臂乘积一定时,动力臂大,动力就大
- C.实验中没有考虑杠杆自身的重,是师生共同的疏忽
- D.实验中没有考虑杠杆转轴处的摩擦力,是因为摩擦力较小
D
分析:(1)在此实验前如果杠杆不再水平位置平衡,可通过反向调节(向偏高的一端)平衡螺母,使杠杆在水平位置平衡;测量过程中不能再调节平衡螺母,而是通过移动砝码来调节衡量平衡;
(2)根据杠杆平衡条件:动力×动力臂=阻力×阻力臂来做出判断;
(3)杠杆在水平位置平衡后,杠杆的重心通过支点,消除杠杆自身重力对杠杆平衡的影响;
(4)由于杠杆转轴处的摩擦力较小,可以忽略不计.
解答:A、调节横梁平衡后,在测量过程中,不可以调节平衡螺母,故A错误;
B、根据杠杆平衡条件:动力×动力臂=阻力×阻力臂:当阻力和阻力臂乘积一定时,动力和动力臂成反比,动力臂大,动力就小,故B错误;
C、杠杆在水平位置平衡后,杠杆的重心通过支点,消除杠杆自身重力对杠杆平衡的影响,故杠杆的自身重可以不考虑,故C错误;
D、由于杠杆转轴处的摩擦力较小,可以忽略不计,故D正确.
故选D
点评:此题主要考查杠杆平衡条件实验中的注意事项以及杠杆平衡条件的应用,基础性题目.
分析:(1)在此实验前如果杠杆不再水平位置平衡,可通过反向调节(向偏高的一端)平衡螺母,使杠杆在水平位置平衡;测量过程中不能再调节平衡螺母,而是通过移动砝码来调节衡量平衡;
(2)根据杠杆平衡条件:动力×动力臂=阻力×阻力臂来做出判断;
(3)杠杆在水平位置平衡后,杠杆的重心通过支点,消除杠杆自身重力对杠杆平衡的影响;
(4)由于杠杆转轴处的摩擦力较小,可以忽略不计.
解答:A、调节横梁平衡后,在测量过程中,不可以调节平衡螺母,故A错误;
B、根据杠杆平衡条件:动力×动力臂=阻力×阻力臂:当阻力和阻力臂乘积一定时,动力和动力臂成反比,动力臂大,动力就小,故B错误;
C、杠杆在水平位置平衡后,杠杆的重心通过支点,消除杠杆自身重力对杠杆平衡的影响,故杠杆的自身重可以不考虑,故C错误;
D、由于杠杆转轴处的摩擦力较小,可以忽略不计,故D正确.
故选D
点评:此题主要考查杠杆平衡条件实验中的注意事项以及杠杆平衡条件的应用,基础性题目.

练习册系列答案
 一课四练系列答案
一课四练系列答案 黄冈小状元满分冲刺微测验系列答案
黄冈小状元满分冲刺微测验系列答案 新辅教导学系列答案
新辅教导学系列答案 阳光同学一线名师全优好卷系列答案
阳光同学一线名师全优好卷系列答案
相关题目
 在“探究杠杆平衡条件”实验中:在已经调平的杠杆左右两边挂钩码,当左侧钩码处于如图所示的A位置时,可以在
在“探究杠杆平衡条件”实验中:在已经调平的杠杆左右两边挂钩码,当左侧钩码处于如图所示的A位置时,可以在 在探究杠杆平衡条件的实验中,如果杠杆右侧高左侧
在探究杠杆平衡条件的实验中,如果杠杆右侧高左侧
如图甲所示,小明在探究“杠杆的平衡条件”实验中所用的实验器材有:杠杆、支架、弹簧测力计、刻度尺、细线和质量相同的钩码若干个。
(1)实验前,将杠杆中点置于支架上,当杠杆静止时,发现杠杆右端下沉。此时,应把杠杆两端的平衡螺母向 (选填“左”或“右”)调节,使杠杆在不挂钩码时,保持 并静止,达到平衡状态。这样做的好处是:便于在杠杆上直接测量 。
(1)实验中要用弹簧测力计水平匀速拉动木块,是因为由 知识可知,此时木块所受的滑动摩擦力等于弹簧测力计的示数。
(2)下表是小李同学设计并记录的实验数据表格:
实验次数 | 压力 | 长木板表面 | 木块放置 | 木块运动快慢 | 弹簧测力计的示数/N |
1 | 一个木块 | 较光滑 | 平放 | 很慢 | 2.2 |
2 | 一个木块 | 较光滑 | 平放 | 慢 | 2.2 |
3 | 一个木块 | 较光滑 | 平放 | 较快 | 2.2 |
小李同学的实验可以验证猜想 (填猜想序号)是 (填“正确”或“错误”)的。
(3)如果他要验证猜想B,他的操作步骤应是:
a、 ;
b、 。
