题目内容
18.下列算式中正确的是( )| A. | 145cm=145÷100=1.45m | B. | 145cm=145÷100m=1.45m | ||
| C. | 145cm=145cm×0.01=1.45m | D. | 145cm=145×0.01m=1.45m |
分析 物理量的单位换算,例如145cm,前面的145是倍数,只是对后面的单位cm进行单位换算,换算到合适的单位,最后整理成最简结果.过程如下:145cm=145×10-2m=1.45m.
解答 解:正确的换算过程为:145cm=145×10-2m=145×0.01m=1.45m.
故ABC错误;D正确;
故选D.
点评 无论是长度单位换算、还是质量单位换算、功率单位换算等等,思路都是相同的.

练习册系列答案
 愉快的寒假南京出版社系列答案
愉快的寒假南京出版社系列答案
相关题目
 如图所示为宾馆房间取电设备的照片,将房卡插入槽中,房间内的用电器才能使用,房卡的作用相当于电路元件中的开关;拔出房卡时,房间内的用电器会因为电路发生断路而全部停止工作;房卡与房内用电器的连接方式是串联.
如图所示为宾馆房间取电设备的照片,将房卡插入槽中,房间内的用电器才能使用,房卡的作用相当于电路元件中的开关;拔出房卡时,房间内的用电器会因为电路发生断路而全部停止工作;房卡与房内用电器的连接方式是串联.
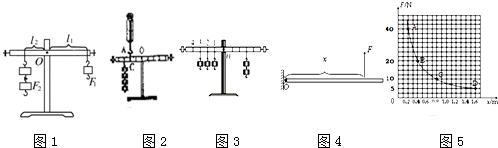
9.如图1所示,某小组研究“杠杆的平衡条件”,器材:有刻度的杠杆、若干个相同的钩码、弹簧测力计等,O为杠杆的支点.
(1)实验前,应先调节杠杆在水平位置平衡.这样做,除了可以消除自身的重力影响,还可以方便地测量或读出力臂.调节时,如发现杠杆左端偏高,应如何操作:将平衡螺母向左调.
(2)某实验小组记录两组数据如下:
根据分析,这组数据中,实验序号为1(选填:“1”或“2”)的一组肯定有错误.检查发现是测量动力臂时读错了,动力臂的实际值比记录值小(选填:大或小).
(3)如图2所示,弹簧测力计在C处由竖直向上逐渐向右倾斜拉动杠杆,仍使杠杆在水平位置保持平衡,则弹簧测力计的示数将变大(选填:变大、变小或保持不变),其原因是该力的力臂变小了.
(4)某次实验中,若采取如图3所示的方式悬挂钩码,杠杆也能在水平位置保持平衡(杠杆上每格等距),但老师却往往提醒大家不要采用这种方式,这主要是以下哪种原因D(选填字母).
A.一个人无法独立操作 B.需要使用太多的钩码
C.力臂与杠杆不重合 D.力和力臂数目过多
(5)如图4所示,实验小组选用长1.6m、粗细均匀的一只金属杆,绕O点在竖直平面内自由转动,同时将一个“拉力--位移传感器”竖直作用在杆上,并使杠杆在水平位置始终保持平衡.该传感器显示其拉力F与作用点到O点距离x的变化关系如图5所示.由图可知金属杆重10N.
(1)实验前,应先调节杠杆在水平位置平衡.这样做,除了可以消除自身的重力影响,还可以方便地测量或读出力臂.调节时,如发现杠杆左端偏高,应如何操作:将平衡螺母向左调.
(2)某实验小组记录两组数据如下:
| 实验序号 | 动力F1/N | 动力臂l1/cm | 阻力F 2/N | 阻力臂l2/cm |
| 1 | 2 | 20 | 1 | 10 |
| 2 | 1 | 8 | 2 | 4 |
(3)如图2所示,弹簧测力计在C处由竖直向上逐渐向右倾斜拉动杠杆,仍使杠杆在水平位置保持平衡,则弹簧测力计的示数将变大(选填:变大、变小或保持不变),其原因是该力的力臂变小了.
(4)某次实验中,若采取如图3所示的方式悬挂钩码,杠杆也能在水平位置保持平衡(杠杆上每格等距),但老师却往往提醒大家不要采用这种方式,这主要是以下哪种原因D(选填字母).
A.一个人无法独立操作 B.需要使用太多的钩码
C.力臂与杠杆不重合 D.力和力臂数目过多
(5)如图4所示,实验小组选用长1.6m、粗细均匀的一只金属杆,绕O点在竖直平面内自由转动,同时将一个“拉力--位移传感器”竖直作用在杆上,并使杠杆在水平位置始终保持平衡.该传感器显示其拉力F与作用点到O点距离x的变化关系如图5所示.由图可知金属杆重10N.
 如图所示,小强想利用图示装置探究声音传播需要的条件.
如图所示,小强想利用图示装置探究声音传播需要的条件.
10.下列现象中可以用光的直线传播解释的是( )
| A. |  | B. |  | C. |  | D. |  |
7. 微距摄影是指照相机通过镜头拍摄与物体等大或稍小的图象.如图所示,一次微距摄影中,拍摄图象与物体等大,光学镜头等效为一个凸透镜,则物体一定位于( )
微距摄影是指照相机通过镜头拍摄与物体等大或稍小的图象.如图所示,一次微距摄影中,拍摄图象与物体等大,光学镜头等效为一个凸透镜,则物体一定位于( )
微距摄影是指照相机通过镜头拍摄与物体等大或稍小的图象.如图所示,一次微距摄影中,拍摄图象与物体等大,光学镜头等效为一个凸透镜,则物体一定位于( )| A. | 两倍焦距以外 | B. | 1倍焦距以内 | ||
| C. | 两倍焦距与1倍焦距之间 | D. | 两倍焦距上 |
