题目内容
1.甲乙两种机械所做的功W随时间t变化的图象如图所示,则从图象可以判断( )
| A. | 甲比乙做功多 | B. | 甲比乙效率高 | C. | 甲比乙做功快 | D. | 甲比乙做功慢 |
分析 根据图象应用功率公式分析答题.
解答 解:AB、机械做功与时间有关,不知道机械做功的时间关系无法比较做功多少,更无法比较效率的高低,故AB错误;
CD、由图象可知,在相等时间内,甲比乙做功多,由P=$\frac{W}{t}$可知,甲的功率大,甲比乙做功快,故C正确,D错误.
故选C.
点评 本题考查了比较机械做功多少与快慢问题,功率越大,机械做功越快.

练习册系列答案
 小天才课时作业系列答案
小天才课时作业系列答案 一课四练系列答案
一课四练系列答案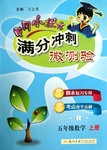 黄冈小状元满分冲刺微测验系列答案
黄冈小状元满分冲刺微测验系列答案 新辅教导学系列答案
新辅教导学系列答案 阳光同学一线名师全优好卷系列答案
阳光同学一线名师全优好卷系列答案
相关题目
11.音叉发声时,若用手捏住音叉振动的部分,就听不到音叉继续发声了,这是因为( )
| A. | 手挡住了音叉发出的声音 | B. | 音叉发出的声音被吸收了 | ||
| C. | 音叉停止了振动 | D. | 音叉的声音不能传播到人身 |

9.如图1所示,某小组研究“杠杆的平衡条件”,器材:有刻度的杠杆、若干个相同的钩码、弹簧测力计等,O为杠杆的支点.
(1)实验前,应先调节杠杆在水平位置平衡.这样做,除了可以消除自身的重力影响,还可以方便地测量或读出力臂.调节时,如发现杠杆左端偏高,应如何操作:将平衡螺母向左调.
(2)某实验小组记录两组数据如下:
根据分析,这组数据中,实验序号为1(选填:“1”或“2”)的一组肯定有错误.检查发现是测量动力臂时读错了,动力臂的实际值比记录值小(选填:大或小).
(3)如图2所示,弹簧测力计在C处由竖直向上逐渐向右倾斜拉动杠杆,仍使杠杆在水平位置保持平衡,则弹簧测力计的示数将变大(选填:变大、变小或保持不变),其原因是该力的力臂变小了.
(4)某次实验中,若采取如图3所示的方式悬挂钩码,杠杆也能在水平位置保持平衡(杠杆上每格等距),但老师却往往提醒大家不要采用这种方式,这主要是以下哪种原因D(选填字母).
A.一个人无法独立操作 B.需要使用太多的钩码
C.力臂与杠杆不重合 D.力和力臂数目过多
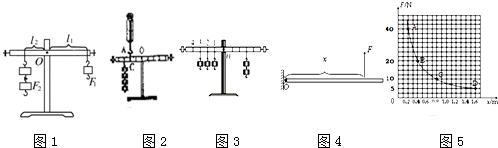
(5)如图4所示,实验小组选用长1.6m、粗细均匀的一只金属杆,绕O点在竖直平面内自由转动,同时将一个“拉力--位移传感器”竖直作用在杆上,并使杠杆在水平位置始终保持平衡.该传感器显示其拉力F与作用点到O点距离x的变化关系如图5所示.由图可知金属杆重10N.
(1)实验前,应先调节杠杆在水平位置平衡.这样做,除了可以消除自身的重力影响,还可以方便地测量或读出力臂.调节时,如发现杠杆左端偏高,应如何操作:将平衡螺母向左调.
(2)某实验小组记录两组数据如下:
| 实验序号 | 动力F1/N | 动力臂l1/cm | 阻力F 2/N | 阻力臂l2/cm |
| 1 | 2 | 20 | 1 | 10 |
| 2 | 1 | 8 | 2 | 4 |
(3)如图2所示,弹簧测力计在C处由竖直向上逐渐向右倾斜拉动杠杆,仍使杠杆在水平位置保持平衡,则弹簧测力计的示数将变大(选填:变大、变小或保持不变),其原因是该力的力臂变小了.
(4)某次实验中,若采取如图3所示的方式悬挂钩码,杠杆也能在水平位置保持平衡(杠杆上每格等距),但老师却往往提醒大家不要采用这种方式,这主要是以下哪种原因D(选填字母).
A.一个人无法独立操作 B.需要使用太多的钩码
C.力臂与杠杆不重合 D.力和力臂数目过多
(5)如图4所示,实验小组选用长1.6m、粗细均匀的一只金属杆,绕O点在竖直平面内自由转动,同时将一个“拉力--位移传感器”竖直作用在杆上,并使杠杆在水平位置始终保持平衡.该传感器显示其拉力F与作用点到O点距离x的变化关系如图5所示.由图可知金属杆重10N.


 如图所示,小强想利用图示装置探究声音传播需要的条件.
如图所示,小强想利用图示装置探究声音传播需要的条件.
10.下列现象中可以用光的直线传播解释的是( )
| A. |  | B. |  | C. |  | D. |  |
11.下列数据中,你认为最接近事实的是( )
| A. | 教室里的一盏日光灯正常工作时通过的电流为5A | |
| B. | 小明跳绳时克服重力做功的功率为80W | |
| C. | 小兰把地上的一本物理书捡起放到课桌上,她克服书的重力做功约20J | |
| D. | 一位中学生从教学楼的一楼走到二楼的过程中克服自身重力做功约40J |