题目内容
12.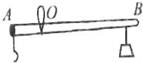 如图是小崔同学自制的杆秤,其中O点为提扭位置,经测量AO长为10cm,OB长为40cm,称砣重2N,秤盘重1N,则小崔自制的杠杆0刻度线距提纽5cm,该杆秤最多能称量7N重的物体,小粟同学认为该秤的最大称量太小,经认真思考,小粟认为不需要换用其他器材,只是在原有杆秤上稍作改动即可增大杆秤的最大称量值,她的方法是O点向左移动.
如图是小崔同学自制的杆秤,其中O点为提扭位置,经测量AO长为10cm,OB长为40cm,称砣重2N,秤盘重1N,则小崔自制的杠杆0刻度线距提纽5cm,该杆秤最多能称量7N重的物体,小粟同学认为该秤的最大称量太小,经认真思考,小粟认为不需要换用其他器材,只是在原有杆秤上稍作改动即可增大杆秤的最大称量值,她的方法是O点向左移动.
分析 杆秤的提纽处O是支点,应用杠杆平衡条件可以求出0刻度线距离O点距离,同时可以分析出增大称量值的办法.
解答 解:
若杠杆0刻度线到提纽的距离为L,
根据杠杆的平衡条件可知:G盘×AO=G砣×L
即:1N×10cm=2N×L,
解得:L=5cm.
当称砣在B处时所称物体重力最大,
根据杠杆的平衡条件可知:(G盘+G最大)×AO=G砣×OB,
即:(1N+G最大)×10cm=2N×40cm
解得:G最大=7N.
由杠杆的平衡条件知:要增大最大称量值,右边力与力臂的乘积应相应的增大,即:G砣•OB需要相应的增大,不换用其它器材的方法:即秤砣的重量不变,加大OB的长,那么可将O点向左移动一些.
故答案为:5;7;O点向左移动.
点评 本题考查了杠杆平衡条件的应用,应用杠杆平衡条件即可正确解题,准确求出各力对应的力臂是解题的关键.

练习册系列答案
 名校联盟快乐课堂系列答案
名校联盟快乐课堂系列答案 黄冈创优卷系列答案
黄冈创优卷系列答案
相关题目
2.下列数据与事实相接近的是( )
| A. | 托起2个鸡蛋的力约为2N | |
| B. | 正常骑自行车的速度约为1.2m/s | |
| C. | 人体感觉舒适的环境温度约为35℃ | |
| D. | 中学生登上一层楼所做的功约为1500J |
3.下列四个句子:(1)这首歌调太高,我唱不上去;(2)引吭高歌;(3)女高音歌唱家;(4)不敢高声语,恐惊天上人.其中“高”字主要指响度的是( )
| A. | (1)(2) | B. | (2)(4) | C. | (1)(3) | D. | (3)(4) |
20.甲、乙两个冰块的质量相同,温度均为0℃,甲冰块置于地面静止,乙冰块静止在10m高处,则这两个冰块( )
| A. | 甲乙机械能一样大 | B. | 甲的机械能大 | ||
| C. | 甲乙内能一样大 | D. | 乙的内能大 |
7.随着人类消耗能源的急剧膨胀,能源越来越紧张,构建节约型社会称为当今世界的主题,节能型的热机是人们关注的焦点,CA6110/125Z型环保节能柴油机是我国自行研制生产的直列六缸四冲程直喷增压水冷节能型柴油机,其部分技术参数如表:
“额定功率”是指柴油机正常工作时对外做机械功的功率;全负荷油耗是指柴油机正常工作时,每输出1kW•h的能量柴油机所消耗的柴油千克数.已知柴油的热值为4.3×107J/kg,水的比热容为4.2×103J/(kg•℃).则
(1)该柴油机全负荷正常工作时,每小时对外做功5.292×108J,消耗柴油32.34kg.
(2)该柴油机的热机效率为38.05%.
| 型号 | CA6110/125Z |
| 缸径×行程 | 110mm×125mm |
| 形式 | 直列六缸水冷四冲程 |
| 吸气方式 | 废气涡轮增压 |
| 压缩比 | 17:1 |
| 额定功率/转速 | 147kW(2500r/min) |
| 外特性烟度 | ≤3.0FSN |
| 排放水平 | 欧I标准 |
| 全负荷油耗 | 220g/(kW•h) |
(1)该柴油机全负荷正常工作时,每小时对外做功5.292×108J,消耗柴油32.34kg.
(2)该柴油机的热机效率为38.05%.

 如图所示,导线A处直径大于B处,RA<RB,如果通过导线A的电流为I1,通过导线B的电流为I2,则它们的大小关系是I1=I2.(选填“<”、“>”或“=”)
如图所示,导线A处直径大于B处,RA<RB,如果通过导线A的电流为I1,通过导线B的电流为I2,则它们的大小关系是I1=I2.(选填“<”、“>”或“=”)
7.如图所示的四种现象中,可以用光沿直线传播解释的是( )
| A. |  露珠放大叶脉 | B. |  狗照镜子 | C. |  日食现象 | D. |  后视镜扩大视野 |