题目内容
在“探究杠杆的平衡条件”的实验中:
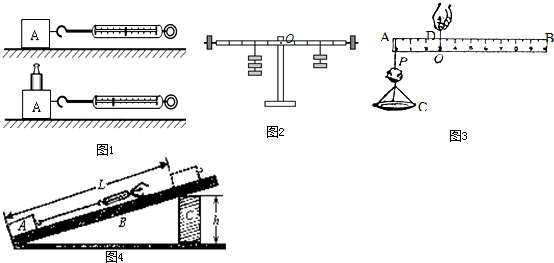
(1)在没有挂钩码时杠杆的平衡位置如图(甲)所示.为使杠杆在水平位置平衡,应将杠杆左端螺母向
(2)调好后,第一组按图(乙)进行实验,第二组按图(丙)进行实验.你认为第
下表是某同学记录了三次实验数据:
(3)这三次实验数据中有一次是错误的,错误数据的实验次数是
(4)在此实验中为什么至少要测三组数据
(1)在没有挂钩码时杠杆的平衡位置如图(甲)所示.为使杠杆在水平位置平衡,应将杠杆左端螺母向
右
右
边旋一些(选填“左“或“右”),使杠杆在水平位置平衡,实验前使杠杆水平平衡的目的是消除杠杆自身重力对杠杆平衡的影响,便于直接从杠杆上读出力臂
消除杠杆自身重力对杠杆平衡的影响,便于直接从杠杆上读出力臂
.(2)调好后,第一组按图(乙)进行实验,第二组按图(丙)进行实验.你认为第
二
二
组实验更好,理由是能在杠杆上直接读出力臂
能在杠杆上直接读出力臂
.下表是某同学记录了三次实验数据:
| 实验次数 | 动力F1/N | 动力臂L1/m | 阻力F2/N | 阻力臂L2/m |
| 1 | 2.0 | 0.04 | 4.0 | 0.02 |
| 2 | 1.0 | 0.02 | 0.5 | 0.01 |
| 3 | 2.5 | 0.03 | 1.5 | 0.05 |
2
2
,由正确实验结果可得杠杆的平衡条件是F1L1=F2L2
F1L1=F2L2
.(4)在此实验中为什么至少要测三组数据
避免实验结论的偶然性
避免实验结论的偶然性
.分析:(1)杠杆在水平位置平衡后,支点到力的作用点的距离就是力臂(重力的方向跟杠杆垂直),同时能够消除杠杆自身重力对杠杆平衡的影响,因此在此实验中我们应首先调节杠杆在水平位置平衡;
(2)探究杠杆平衡条件时,使杠杆在水平位置平衡,此时力的方向与杠杆垂直,力臂的长度可以直接从杠杆上读出来;
(3)杠杆的平衡条件是:动力×动力臂=阻力×阻力臂(或F1L1=F2L2),将题中表格中的已知数据代入F1L1=F2L2中进行计算即可得到答案.
(4)要想得出的结论具有普遍性,防止偶然性,就应该通过多次实验来获得数据归纳出结论.
(2)探究杠杆平衡条件时,使杠杆在水平位置平衡,此时力的方向与杠杆垂直,力臂的长度可以直接从杠杆上读出来;
(3)杠杆的平衡条件是:动力×动力臂=阻力×阻力臂(或F1L1=F2L2),将题中表格中的已知数据代入F1L1=F2L2中进行计算即可得到答案.
(4)要想得出的结论具有普遍性,防止偶然性,就应该通过多次实验来获得数据归纳出结论.
解答:解:(1)杠杆不在水平位置平衡,左端向下倾斜,则重心应向右移动,故应将右端的平衡螺母向右调节;实验前使杠杆在水平位置平衡,其目的是杠杆的重心恰好通过支点,消除杠杆自身重力对杠杆平衡的影响,同时便于直接从杠杆上读出力臂;
(2)力臂等于支点到力的作用线的距离,当杠杆在水平位置平衡时,力的方向与杠杆垂直,力臂可以从杠杆标尺刻度上直接读出来.因此第二组实验设计的好,此时弹簧测力计的拉力与杠杆垂直,力臂直接从杠杆上直接读取.
(3)因为表格中第2次实验F1L1=1×0.02=0.02,而F2L2=0.5×0.01=0.005,所以F1L1≠F2L2,故第2次实验数据有误;杠杆的平衡条件是动力×动力臂=阻力×阻力臂(或F1L1=F2L2).
(4)如果实验次数太少,实验研究得出结论具有偶然性,不具有普遍性,实验结论必须在多次试验的基础上得出,这样才能有效地避免实验结果偶然性出现.
故答案为:(1)右;消除杠杆自身重力对杠杆平衡的影响,便于直接从杠杆上读出力臂;(2)二;能在杠杆上直接读出力臂;(3)2;F1L1=F2L2;(4)避免实验结论的偶然性.
(2)力臂等于支点到力的作用线的距离,当杠杆在水平位置平衡时,力的方向与杠杆垂直,力臂可以从杠杆标尺刻度上直接读出来.因此第二组实验设计的好,此时弹簧测力计的拉力与杠杆垂直,力臂直接从杠杆上直接读取.
(3)因为表格中第2次实验F1L1=1×0.02=0.02,而F2L2=0.5×0.01=0.005,所以F1L1≠F2L2,故第2次实验数据有误;杠杆的平衡条件是动力×动力臂=阻力×阻力臂(或F1L1=F2L2).
(4)如果实验次数太少,实验研究得出结论具有偶然性,不具有普遍性,实验结论必须在多次试验的基础上得出,这样才能有效地避免实验结果偶然性出现.
故答案为:(1)右;消除杠杆自身重力对杠杆平衡的影响,便于直接从杠杆上读出力臂;(2)二;能在杠杆上直接读出力臂;(3)2;F1L1=F2L2;(4)避免实验结论的偶然性.
点评:在探究杠杆平衡条件时,杠杆的重心应调到支点上,使其不影响两边力与力臂的乘积相等;为实验结论更令人信服,应当多做几次试验,避免实验结论的偶然性.

练习册系列答案
 新思维假期作业寒假吉林大学出版社系列答案
新思维假期作业寒假吉林大学出版社系列答案
相关题目


甲乙两个实验小组在探究“杠杆的平衡条件”时,分别得到下面两组数据和结论
| 甲 组 | |||||
| 次数 | 动力 | 动力臂 | 阻力 | 阻力臂 | |
| 1 | 7 | 4 | 2 | 14 | |
| 2 | 6 | 4 | 8 | 3 | |
| 3 | 4 | 5 | 2 | 10 | |
| 结论 | 动力*动力臂=阻力*阻力臂 | ||||
| 乙 组 | |||||
| 次数 | 动力 | 动力臂 | 阻力 | 阻力臂 | |
| 1 | 3 | 4 | 4 | 3 | |
| 2 | 4 | 5 | 5 | 4 | |
| 结论 | 动力+动力臂=阻力+阻力臂 | ||||
他们在交流时,乙组发现了自己实验结论的错误和出现错误的原因。你认为乙组出现错误的原因有哪些?请找出两条.
原因①:________________________________________________________________.
原因②:________________________________________________________________.

