题目内容
【题目】小颖小组在做“测量小灯泡电功率”的实验中,实验室有如下器材:电源(电压恒为6V),小灯泡L(额定电压为2.5V,灯丝电阻约为10Ω),电流表、电压表、开关、规格分别为“10Ω 1A”的滑动变阻器R1和“50Ω 0.5A”的滑动变阻器R2各一个,导线若干。
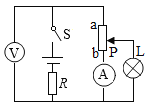
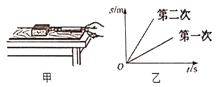
(1)请用笔画线代替导线,帮小颖将如图甲中的电路连接完整。
(_______)
(2)为了顺利完成实验,小颖应选用规格为_____(选填“R1”或“R2”)的滑动变阻器。
(3)连接电路后,闭合开关,发现小灯泡不亮,电流表无示数,电压表有示数,原因可能是_____。
(4)移动滑动变阻器滑片P的位置。获得多组对应的电压值和电流值,绘制小灯泡U﹣I图象如图乙所示,小灯泡的额定功率为_____W.分析乙中图象发现小灯泡电阻是变化的,影响其变化的主要原因是_____。
(5)小颖小组通过分析认为,如果增加已知阻值的定值电阻R0,只利用一只电流表,通过简单操作(开关S接“a”、“b”各一次)也能测量小灯泡的额定功率,图丙、丁是他们设计的两种电路图,其中能完成测量的是电路图_____。
【答案】 R2 灯泡断路 0.625 灯丝的电阻随温度的变化而变化 丙
R2 灯泡断路 0.625 灯丝的电阻随温度的变化而变化 丙
【解析】
第一空.小灯泡L额定电压为2.5V,所以,电压表应选用小量程与灯并联,电路连接如下所示:
第二空.电源(电压恒为6V),小灯泡L(额定电压为2.5V,灯丝电阻约为10Ω),由欧姆定律,灯的额定电流是:![]() =0.25A,
=0.25A,
由串联电路电压的规律知道,灯正常发光时,变阻器的电压是:
6V﹣2.5V=3.5V,
由欧姆定律知道,变阻器连入电路中的电阻是:![]() =14Ω,
=14Ω,
从电阻和电流大小考虑,应选用规格为R2的滑动变阻器;
第三空.经分析,连接电路后,闭合开关,发现小灯泡不亮,电流表无示数,电压表有示数,原因可能是灯泡断路。
第四空.由U﹣I图象知道,灯在额定电压下的电流为0.25A,所以,小灯泡的额定功率是:
P=U额定I=2.5V×0.25A=0.625W;
第五空.由乙中图象知道,小灯泡的U﹣I图像是一条曲线,即电阻是变化的,造成这种变化的主要原因是:灯丝的电阻随温度的变化而变化;
第六空.图丙中,干路开关闭合,S接b,电流表测电阻R0的电流,灯与电阻R0并联,电流表示数为![]() ,灯的电压为2.5V,灯会正常发光;当S接a时,电流表测量的是干路中的电流,因电路的连接关系没有改变,各电阻的大小和通过的电流不变,灯仍正常发光,根据并联电路电流关系可以求出灯泡的额定电流,根据P=UI能求出灯泡的额定功率,故图丙可以;图丁中,S接b时,测的是灯泡的电流,接a时,测量通过R0的电流,不能确定灯是否正常发光,故不能求出灯的额定功率,即图丁不可以。
,灯的电压为2.5V,灯会正常发光;当S接a时,电流表测量的是干路中的电流,因电路的连接关系没有改变,各电阻的大小和通过的电流不变,灯仍正常发光,根据并联电路电流关系可以求出灯泡的额定电流,根据P=UI能求出灯泡的额定功率,故图丙可以;图丁中,S接b时,测的是灯泡的电流,接a时,测量通过R0的电流,不能确定灯是否正常发光,故不能求出灯的额定功率,即图丁不可以。



【题目】阅读下面的短文,回答问题。
智能机器人
智能机器人有相当发达的“大脑”,具备形形色色的内部信息传感器和外部信息传感器如视觉、听觉、触觉、嗅觉。此外,它还有效应器,通过电动机使手、脚、鼻子、触角等动起来。
智能机器人能用人类语言同操作者对话,能调整自己的动作以达到操作者所提出的全部要求。机器人往往使用熔点为200℃的玻璃钢作外壳,有着其它材质不可替代的优点智能机器人的电源主要有钠硫电池、镍镉电池、锂电池等。
随着智能机器人技术的不断发展和成熟,它将走进千家万户,服务人们的生活。
某款机器人 | 锂电池 | 电压 | 24V |
容量 | 10Ah | ||
电动机 | 额定电压 | 24V | |
额定功率 | 120W |
(1)锂电池充电时的能量转化形式为:电能转化为_____。
(2)关于智能机器人,下列说法中有哪些是正确的?答:_____。
A.传感器是将非电学量转化为电学量的装置
B.温度为200℃的玻璃钢一定是液态
C.智能机器人通过嗅觉能闻到外界的各种气味,说明分子在做无规则的运动
D.智能机器人将最终代替人类
(3)某智能机器人“小骏”站着发射超声波,经过0.02s后收到障碍物的回波,则“小骏”与障碍物间的距离约为_____m.“小骏”靠底座轮子驱动,其驱动电动机的具体参数如表所示,若“小骏”的驱动电动机线圈电阻为0.2Ω,则电动机正常工作下的发热功率为_____W.(设超声波在空气中的传播速度为340m/s)
(4)若当剩余电量减为电池容量的10%时,“小骏”会主动寻找充电器充电,则充满电后至下一次自动充电前,“小骏”能够连续正常工作的最长时间为_____h.为确保“小骏”能顺利返回充电,假设需要充电时离充电器最远路程不能超过600m,则“小骏”返回过程中受到的水平阻力为_____N.(剩余电池容量的40%用于提供克服阻力做功)