题目内容
17.如图所示,小明关于光现象的描述,其原理与其它三个不同的是( )| A. |  天空中雨后的彩虹 | B. |  用放大镜观察邮票 | ||
| C. |  塔在湖面上的倒影 | D. |  筷子在水面处弯折 |
分析 光在自然界中存在三种光现象:
(1)光在同种均匀物质中沿直线传播,在日常生活中,激光准直、小孔成像和影子的形成等都表明光在同一种均匀介质中是沿直线传播的;
(2)当光照射到物体界面上时,有一部分光被反射回来,例如:平面镜成像、水中倒影等;
(3)当光从一种介质斜射入另一种介质时,传播方向的会偏折,发生折射现象,如:看水里的鱼比实际位置浅、凸透镜成像等.彩虹的形成是光的色散,其实质也是光的折射形成的.
解答 解:A、天空中雨后的彩虹是光的色散现象,其实质是光的折射形成的;
B、用放大镜观察邮票是凸透镜对光进行了折射,成正立、放大的虚像;
C、塔在湖面上的倒影是平面镜成像,其实质是光的反射形成的;
D、筷子在水面处弯折是光在界面处发生折射形成的.
综合以上分析,ABD为光的折射,C为光的反射,故与其它三个的光学原理不同的是C选项.
故选C.
点评 本题列举了四个常见的光现象,综合了光学知识,需要学生在平时学习和生活中多对相关的光现象进行思考.

练习册系列答案
 名校课堂系列答案
名校课堂系列答案
相关题目
7.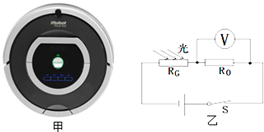 扫地机器人是一款能自动清扫的智能家用电器,如图甲.
扫地机器人是一款能自动清扫的智能家用电器,如图甲.
机器人通过电动机旋转产生高速气流,将灰尘、杂物吸入集尘盒;其防滑轮皮采用凸凹材质制成;底部安装有塑料刷,用于清扫吸附在地板上的灰尘及轻小物体;前端装有感应器,通过发射、接收超声波或红外线来侦测障碍物.当剩余电量减为电池容量的20%时,机器人会主动寻找充电器充电.表一为某扫地机器人的部分参数.电池容量指放电电流与放电总时间的乘积.
表一:
机器人中吸尘电机的吸入功率是衡量其优劣的重要参数,测得某吸尘电机的吸入功率与真空度、风量间的对应关系如表二.真空度指主机内部气压与外界的气压差.风量指单位时间内通过吸尘电机排出的空气体积.吸尘电机吸入功率与输入功率的比值叫做效率.
表二:
(1)机器人工作时,主机内部的气压小于(选填“大于”、“小于”或“等于”)大气压而产生吸力.若该机器人向障碍物垂直发射超声波,经过0.001s收到回波,则其发射超声波时与障碍物间的距离约为17cm.(设超声波在空气中的传播速度为340m/s)
(2)下列说法中错误的是B.
A.地面有静电时,轻小物体会吸附在地板上而不易清扫
B.当遇到玻璃门等透明障碍物时,使用红外线感应器效果较好
C.机器人工作时发出的声音不会对人的听力造成损伤
D.采用凸凹材质的轮皮,可增大机器人与地面间的摩擦
(3)该机器人正常工作时的电流为2.5A;充满电后至下一次自动充电前能够连续正常工作的最长时间为48min.
(4)由表二数据可知,当风量为0.015m3/s时,若吸尘电机的输入功率为25W,此时其效率为33%;上述风量下,10min内通过吸尘电机提出的空气质量为11.7kg.(取ρ空气=1.3kg/m3)
(5)光敏电阻是制作灰尘传感器的常用元件.图乙为某光敏电阻的控制电路,电源电压U0恒定,RG为光敏电阻,其阻值随空气透光程度的变化而变化,R0为定值电阻.当光敏电阻分别为6Ω和18Ω时,电压表的示数分别为6V和3V,则R0=6Ω;为监测空气的透光程度,要将电压表表盘的相关刻度值转化为对应的总阻值(R0+RG),则转化后表盘上从左到右刻度线对应的阻值将减小(选填“增大”、“不变”或“减小”).
扫地机器人是一款能自动清扫的智能家用电器,如图甲.机器人通过电动机旋转产生高速气流,将灰尘、杂物吸入集尘盒;其防滑轮皮采用凸凹材质制成;底部安装有塑料刷,用于清扫吸附在地板上的灰尘及轻小物体;前端装有感应器,通过发射、接收超声波或红外线来侦测障碍物.当剩余电量减为电池容量的20%时,机器人会主动寻找充电器充电.表一为某扫地机器人的部分参数.电池容量指放电电流与放电总时间的乘积.
表一:
| 额定工作电压 | 12V | 额定功率 | 30W |
| 电池容量 | 2500mAh | 工作噪音 | <50dB |
表二:
| 真空度(Pa) | 400 | 450 | 500 | 550 | 600 |
| 风量(m3/s) | 0.025 | 0.02 | 0.017 | 0.015 | 0.013 |
| 吸入功率(W) | 10.00 | 9.00 | 8.50 | 7.80 |
(2)下列说法中错误的是B.
A.地面有静电时,轻小物体会吸附在地板上而不易清扫
B.当遇到玻璃门等透明障碍物时,使用红外线感应器效果较好
C.机器人工作时发出的声音不会对人的听力造成损伤
D.采用凸凹材质的轮皮,可增大机器人与地面间的摩擦
(3)该机器人正常工作时的电流为2.5A;充满电后至下一次自动充电前能够连续正常工作的最长时间为48min.
(4)由表二数据可知,当风量为0.015m3/s时,若吸尘电机的输入功率为25W,此时其效率为33%;上述风量下,10min内通过吸尘电机提出的空气质量为11.7kg.(取ρ空气=1.3kg/m3)
(5)光敏电阻是制作灰尘传感器的常用元件.图乙为某光敏电阻的控制电路,电源电压U0恒定,RG为光敏电阻,其阻值随空气透光程度的变化而变化,R0为定值电阻.当光敏电阻分别为6Ω和18Ω时,电压表的示数分别为6V和3V,则R0=6Ω;为监测空气的透光程度,要将电压表表盘的相关刻度值转化为对应的总阻值(R0+RG),则转化后表盘上从左到右刻度线对应的阻值将减小(选填“增大”、“不变”或“减小”).
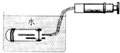
8.某课外物理合作探究小组制作了如图所示的潜水艇模型,下列说法正确的是( )
| A. | 潜艇模型下沉的时候,受到的水的压强不变 | |
| B. | 向外拉注射器活塞,试管内水量适当时,可实现潜艇悬浮 | |
| C. | 向内推注射器活塞,水会被压入试管中,可实现潜艇下沉 | |
| D. | 潜艇模型的试管上绕铁丝,目的是为了增大在水中的浮力 |
 云宵枇杷以早熟、风味香浓、肉质鲜嫩而得到人们的青睐,素有“闽南开春第一果”之称,小希想知道枇杷的密度,于是他利用实验室的器材测量枇杷的密度.
云宵枇杷以早熟、风味香浓、肉质鲜嫩而得到人们的青睐,素有“闽南开春第一果”之称,小希想知道枇杷的密度,于是他利用实验室的器材测量枇杷的密度.
2.如图所示,从电动自行车的结构和使用来看,下列解释正确的是( )

| A. | 刹车装置相当于费力杠杆 | |
| B. | 轮胎上做有凹凸不平的花纹是为了增大摩擦 | |
| C. | 车的坐垫较软,是为了增大对人臀部的压强 | |
| D. | 电动自行车在正常行驶过程中是将机械能转化为电能 |

6.下面是同学们在校园内观察到的一些使用能源的工具,其中属于可再生能源的是( )
| A. | 太阳能路灯所用的太阳能 | B. | 供热系统燃烧的天然气能源 | ||
| C. | 内燃机汽车所消耗的燃油能源 | D. | 保安手持的手电筒内的普通干电池 |
7.关于运动和力,下列说法正确的是( )
| A. | 加速下落的排球所受合力可能为零 | |
| B. | 做匀速直线运动的汽车所受合力一定为零 | |
| C. | 踢出去的足球由于具有惯性,还能在水平草地上继续运动一段距离 | |
| D. | 静止在水平地面上的课桌,它对地面的压力与地面对它的支持力是一对平衡力 |