题目内容
14.扫地机器人是一款能自动清扫的智能家用电器,如图甲.机器人通过电动机旋转产生高速气流,将灰尘、杂物吸入集尘盒.其防滑轮皮采用凹凸材质制成,底部安装有塑料刷,用于清扫吸附在地板上的灰尘及轻小物体;前端装有感应器,通过发射、接收超声波或红外线来侦测障碍物.当剩余电量减为电池容量的20%时,机器人会主动寻找充电器充电.
某扫地机器人的部分参数如下表:(电池容量指放电电流与放电总时间的乘积)
| 额定工作电压 | 12V | 额定功率 | 30W |
| 电池容量 | 2.5Ah | 工作噪音 | <50dB |
(2)当地面有静电时,扫地机器人相对不易清扫,这是因为带电体具有吸引轻小物体的性质.
(3)该机器人正常工作时的电流为多少安?充满电后至下一次自动充电前,能够连续正常工作时间为多少?
(4)能自动工作的传感器由光敏电阻制作而成.图乙为某光敏电阻的控制电路,电源电压U0恒定,RG为光敏电阻,其阻值随空气透光程度的变化而变化,R0为定值电阻.当光敏电阻分别为6Ω和18Ω时,电压表的示数分别为6V和3V,则R0=6Ω.
分析 (1)由流体压强与流速的关系:流速越大的位置压强越小;
(2)静电现象,带电体具有吸引轻小物体的性质;
(3)知道额定电压和额定功率,根据I=$\frac{P}{U}$求出机器人正常工作时的电流;
先算出消耗的电池容量Q=Q1-Q2,再利用t=$\frac{Q}{I}$求出连续正常工作的最长时间;
(4)根据串联电路电流相等的特点,利用欧姆定律I=$\frac{U}{R}$列出光敏电阻在不同阻值的电流方程,联立即可解得定值电阻的阻值.
解答 解:(1)由流体压强与流速的关系:流速越大的位置压强越小,可知机器人在工作时,由于转动的扇叶处气体的流速大,压强小,在外界大气压的作用下将灰尘、杂物吸入集尘盒,故主机内部的气压小于大气压而产生吸力.
(2)地面有静电时,由于带电体具有吸引轻小物体的性质,所以轻小物体会吸附在地板上而不易清扫;
(3)由P=IU得,
机器人正常工作时的电流I=$\frac{P}{U}$=$\frac{30W}{12V}$=2.5A.
充满电后的电池容量Q1=2.5Ah,下一次自动充电前的电池容量Q2=ηQ1=20%×2.5Ah=0.5Ah,
消耗的电池容量Q=Q1-Q2=2.5Ah-0.5Ah=2Ah,
正常工作时的电流I=2.5A,
由I=$\frac{Q}{t}$=得,连续正常工作的最长时间:
t=$\frac{Q}{I}$=$\frac{2Ah}{2.5A}$=0.8h.
(4)由电路图可知,光敏电阻RG和定值电阻R0串联,电压表测定值电阻R0两端的电压,
当光敏电阻RG1=6Ω时,电压表的示数U1=6V,光敏电阻两端的电压U=U0-U1,
此时电路中的电流I1=$\frac{{U}_{1}}{{R}_{0}}$=$\frac{{U}_{0}-{U}_{1}}{{R}_{G1}}$,即$\frac{6V}{{R}_{0}}$=$\frac{{U}_{0}-6V}{6Ω}$…①
当光敏电阻RG2=18Ω时,电压表的示数U1=3V,光敏电阻两端的电压U′=U0-U2,
此时电路中的电流I2=$\frac{{U}_{2}}{{R}_{0}}$=$\frac{{U}_{0}-{U}_{2}}{{R}_{G2}}$,即$\frac{3V}{{R}_{0}}$=$\frac{{U}_{0}-3V}{18Ω}$…②
联立①②可解得:U0=12V,R0=6Ω.
故答案为:
(1)小于;
(2)带电体具有吸引轻小物体的性质;
(3)该机器人正常工作时的电流为2.5A;充满电后至下一次自动充电前,能够连续正常工作时间为0.8h;
(4)6.
点评 本题涉及到力学、电学等物理知识,综合性很强,有一定的难度,需要仔细分析判断.学生要熟练掌握电流的定义式、欧姆定律、效率公式的综合应用,理解电池容量的含义和效率公式的应用是关键.

 智能训练练测考系列答案
智能训练练测考系列答案



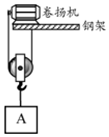 图是用动滑轮运送建筑材料A的示意图,在卷扬机对绳子的拉力作用下,使重800N的建筑材料A在50s的时间里,匀速竖直上升了10m.在这个过程中卷扬机对绳子的拉力F做功的功率为200W.绳重可忽略不计.求:
图是用动滑轮运送建筑材料A的示意图,在卷扬机对绳子的拉力作用下,使重800N的建筑材料A在50s的时间里,匀速竖直上升了10m.在这个过程中卷扬机对绳子的拉力F做功的功率为200W.绳重可忽略不计.求: 如图所示,模拟的是天舟一号和天宫二号的对接过程,在对接过程中,相对于天宫二号,天舟一号是运动(选填“运动”或“静止”)的.
如图所示,模拟的是天舟一号和天宫二号的对接过程,在对接过程中,相对于天宫二号,天舟一号是运动(选填“运动”或“静止”)的.| A. |  划火柴点火 | B. |  在火炉上将水烧开 | ||
| C. |  运动员举起杠铃 | D. |  刚从泳池出来感到冷 |