题目内容
1. 某同学研究杠杆的平衡条件的实验装置如图所示,已知杠杆处于平衡,将表内某同学漏记的数值填入,分析实验数据得出杠杆的平衡条件结论是F1L1=F2L2.
某同学研究杠杆的平衡条件的实验装置如图所示,已知杠杆处于平衡,将表内某同学漏记的数值填入,分析实验数据得出杠杆的平衡条件结论是F1L1=F2L2.| 实验次数 | 动力F1(N) | 动力臂L1(cm) | 阻力F2(N) | 阻力臂L2(cm) |
| 1 | 10 | 6 | 15 | |
| 2 | 3 | 15 | 20 |
分析 通过分析数据可得出杠杆平衡的条件,并根据杠杆平衡的条件可填上表格所缺数据.
解答 解:
由实验得出,杠杆的平衡条件是F1L1=F2L2;
根据杠杆平衡的条件F1L1=F2L2可知,
第一次实验,F1×10cm=6N×15cm,可得:F1=9N;
第二次实验,3N×L1=15N×20cm,可得:L1=100cm.
故答案为:F1L1=F2L2;
| 实验次数 | 动力F1(N) | 动力臂L1(cm) | 阻力F2(N) | 阻力臂L2(cm) |
| 1 | 9 | 10 | 6 | 15 |
| 2 | 3 | 100 | 15 | 20 |
点评 知道杠杆平衡的条件,会根据杠杆平衡的条件计算动力和力臂的大小.

练习册系列答案
相关题目
13.磁性水雷是用一个可以绕轴转动的小磁针来控制起爆电路的,军舰被地磁场磁化后就变成了一个浮动的磁体,当军舰接近水雷时,就会引起水雷的爆炸.下列各组实验中,实验原理和水雷相同的是( )
| A. |  | B. |  | ||
| C. |  | D. |  |

 B.
B.  C.
C.  D.
D. 

6.根据“探究杠杆平衡的条件”实验要求,完成下列各题: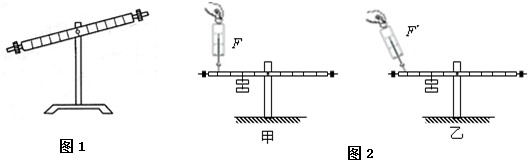
(1)杠杆平衡,是指杠杆处于静止状态或匀速状态.
(2)该实验中所用的器材有铁架台、带刻度的杠杆、钩码、弹簧夹和弹簧测力计.某同学先把杠杆的中点支在支架上,发现杠杆的右端翘起如图1所示,他可以通过调节左端的平衡螺母向右移动,使杠杆在水平位置平衡,这样做的目的是便于测量力臂.
(3)如果采用图2的方法实验,当弹簧测力计由图甲竖直的拉着变成图乙倾斜的拉着,使杠杆在水平位置静止时,弹簧测力计的示数将变大(选填“变大”、“不变”或“变小”).
(4)小明同学做了二次试验,得到当杠杆平衡时如表中记录的数据:
这两组数据中,可以肯定序号2的一组数据是错误的,如果他的操作正确,钩码的重量和力臂的值也没有错,那么此组数据的错误的原因是动力或动力臂测量错误.
(5)改变力和力臂的数值,实验三次的目的是C
A、从三次试验中选取最准确的数据;
B、三次测量取平均值,减小实验误差;
C、从实验数据中得到普遍规律;
D、利用控制变量法.
(6)本实验的实验结论是F1L1=F2L2.
(1)杠杆平衡,是指杠杆处于静止状态或匀速状态.
(2)该实验中所用的器材有铁架台、带刻度的杠杆、钩码、弹簧夹和弹簧测力计.某同学先把杠杆的中点支在支架上,发现杠杆的右端翘起如图1所示,他可以通过调节左端的平衡螺母向右移动,使杠杆在水平位置平衡,这样做的目的是便于测量力臂.
(3)如果采用图2的方法实验,当弹簧测力计由图甲竖直的拉着变成图乙倾斜的拉着,使杠杆在水平位置静止时,弹簧测力计的示数将变大(选填“变大”、“不变”或“变小”).
(4)小明同学做了二次试验,得到当杠杆平衡时如表中记录的数据:
| 实验序号 | 动力F1(N) | 动力臂L1(cm) | 阻力F2(N) | 阻力臂L2(cm) |
| 1 | 2 | 12 | 6 | 4 |
| 2 | 4 | 16 | 2 | 8 |
(5)改变力和力臂的数值,实验三次的目的是C
A、从三次试验中选取最准确的数据;
B、三次测量取平均值,减小实验误差;
C、从实验数据中得到普遍规律;
D、利用控制变量法.
(6)本实验的实验结论是F1L1=F2L2.
 某同学利用如图所示的器材探究液体内部压强的特点.
某同学利用如图所示的器材探究液体内部压强的特点.
