题目内容
【题目】在“探究杠杆的平衡条件”实验中,每个钩码的重力相等,杠杆刻度均匀。
(1)平衡时,应该让杠杆静止在_________________位置。
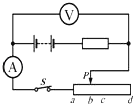
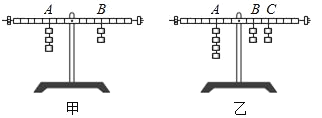
(2)小周同学所在实验小组完成某次操作后,实验现象如图所示,他们记录的数据为:动力F1=1.5N,动力臂L1=0.1m,阻力F2=1N,则阻力臂L2=________m。
(3)下列四个因素中,不会带来实验误差的是 (____________)
A.铁架台自身的重力足够大 B.单个钩码的重力不完全相等
C.悬挂钩码的绳套重力偏大 D.杠杆与转轴之间的摩擦偏大
(4)小周同学所在实验小组在完成规定实验后,他们进一步探究,如果杠杆受到F2、F3两个阻力,结果会怎样?通过实验,他们得到了右图所示的结果。根据这个结果,可以初步得到,在这种情况下杠杆的平衡条件为:F1L1=__________。(F1、F2、F3的力臂分别用L1、L2、L3表示)
【答案】水平 0.15 A F2L2+F3L3
【解析】
(1)[1]为了便于从杠杆上直接读取力臂,在进行实验时应该使杠杆在水平位置平衡。
(2)[2]杠杆平衡条件为:
F1L12=F2L2,
由杠杆平衡条件得:
1.5N×0.1m=1N×L2,
得:
L2=0.15m;
(3)[3]A.铁架台自身的重力足够大目的使杠杆稳定,但对杠杆的平衡无影响,故A项符合题意;
B. 单个钩码的重力不完全相等,则多个钩码总重力无法确定,对实验结果有影响,故B项不符合题意;
C. 悬挂钩码的绳套重力偏大,会对力的真实值有影响,故C项不符合题意;
D. 杠杆与转轴之间的摩擦偏大会影响杠杆的灵敏,对测量结果造成误差,故D项不符合题意。
故选A。
(4)[4]设一个钩码的重力为G,杠杆一个格的长度为L,根据杠杆平衡条件可知,杠杆右侧
F3L3+F2L2=2G×2L+2G×4L=12GL。
杠杆左侧
F1L1=4G×3L=12GL。
左侧等于右侧,故
F3L3+F2L2=F1L1。

 阅读快车系列答案
阅读快车系列答案



【题目】近年来,多旋翼无人机发展迅速。由于其机动性和灵活性强,广泛应用在航拍领域、交通管理等方面。如图所示为某品牌四旋翼无人机,它采用4个电机带动旋翼(螺旋桨)转动,对下方空气施力的同时获得升力。该无人机设有一键起降和返航、空中悬停等功能,携带的摄像机可以进行高清拍摄并实时把信号传到遥控器显示器,它还拥有GPS卫星定位系统。下表是该无人机的部分参数:
整机质量 | 2kg | 电池额定电压 | 15V |
最大起飞海拔高度 | 5000m | 电池容量 | 5000mAh |
最大上升速度 | 6m/s | 电动机工作电压 | 12V |
最大下降速度 | 2m/s | 悬停时每个电动机功率 | 50W |
最大水平速度 | 16m/s | 电动机数量 | 4 |
(1)根据上述内容,下列说法中不正确的是_____
A.遥控无人机、卫星定位都是通过电磁波来传递信息的B.无人机利用了空气对旋翼的反作用力从而获得升力
C.无人机在拍摄地面图象时减小悬停高度可以使图象变大D.无人机在悬停时不消耗电能
(2)电动机在工作时要保持其两端电压为12V不变,通过电子调速器(简称电调)来控制电动机的电流从而改变电动机的功率,每一个电动机连接一个电调,那么电动机和电调的连接方式是_____(选填“并联”或“串联”),若电源电压全部加在电动机和电调的两端,则电动机和电调的功率之比为_____。
(3)在电池满容量的情况下,该无人机参与某次火情的勘测时,需要从地面起飞,飞到火场上空60米高处,然后悬停观测(整个过程四个电动机同时工作)。由于无人机机动性和灵活性强,这一过程可视为以最大速度匀速直线上升,且达到60米高处时立即静止(悬停)。若无人机悬停观测10分钟,电动机将电能转化为机械能的效率为90%,无人机上升过程中所受的阻力为10N,通过计算回答下列问题:(g取10N/kg)

a.从起飞到悬停结束,电动机消耗多少电能________?电调部分消耗多少电能_________?
b.若无人机从60米高处返回到地面,要求电池容量至少剩余10%,若不计其他能量损失,该无人机完成悬停观测后,能否安全返回 ________?