题目内容
分解因式:3a2+6a+3=_____.
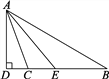
如图,AD⊥BD,AE平分∠BAC,∠B=30°,∠ACD=70°.求∠DAE的度数.
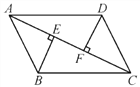
如图,四边形ABCD是平行四边形,AC是对角线,BE⊥AC,垂足为E,DF⊥AC,垂足为F.求证:DF=BE.
如图,抛物线y=﹣x2+bx+c与x轴交于A、B两点(A在B点左侧),与y轴交于点C,对称轴为直线x=,OA=2,OD平分∠BOC交抛物线于点D(点D在第一象限);
(1)求抛物线的解析式和点D的坐标;
(2)点M是抛物线上的动点,在x轴上存在一点N,使得A、D、M、N四个点为顶点的四边形是平行四边形,求出点M的坐标;
(3)在抛物线的对称轴上,是否存在一点P,使得△BPD的周长最小?若存在,请求出点P的坐标;若不存在,请说明理由.
化简:(a+1﹣)•.
若实数x,y满足|x﹣4|+=0,则以x,y的值为边长的等腰三角形的周长为( )
A. 20 B. 16 C. 20或16 D. 12
某校机器人兴趣小组在如图①所示的矩形场地上开展训练,机器人从点A出发,在矩形ABCD边上沿着A→B→C→D的方向匀速移动,到达点D时停止移动,已知AD=6个单位长度,机器人的速度为1个单位长度/s且其移动至拐角处调整方向所需时间忽略不计.设机器人所用时间为t(s)时,其所在位置用点P表示,P到对角线BD的距离(即垂线段PQ的长)为d个单位长度,其中d与t的函数图象如图②所示.
(1)图②中函数图象与纵轴的交点的纵坐标在图①中表示一条线段的长,请在图①中画出这条线段.
(2)求图②中a的值;
(3)如图②,点M、N分别在线段EF、GH上,线段MN平行于横轴,M、N的横坐标分别为t1、t2.设机器人用了t1(s)到达点P1处,用了t2(s)到达点P2处(见图①).若CP1+CP2=7,求t1、t2的值.
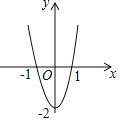
将如图所示的抛物线向右平移1个单位长度,再向上平移3个单位长度后,得到的抛物线解析式是( )
A. y=(x-1)2+1 B. y=(x+1)2+1 C. y=2(x-1)2+1 D. y=2(x+1)2+1
实数在数轴上的位置如图所示:
化简: =________。

 x2+bx+c与x轴交于A、B两点(A在B点左侧),与y轴交于点C,对称轴为直线x=
x2+bx+c与x轴交于A、B两点(A在B点左侧),与y轴交于点C,对称轴为直线x= ,OA=2,OD平分∠BOC交抛物线于点D(点D在第一象限);
,OA=2,OD平分∠BOC交抛物线于点D(点D在第一象限);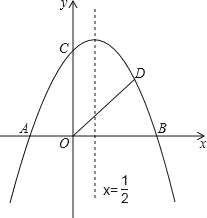
 )•
)• .
. =0,则以x,y的值为边长的等腰三角形的周长为( )
=0,则以x,y的值为边长的等腰三角形的周长为( ) 在图①中表示一条线段的长,请在图①中画出这条线段.
在图①中表示一条线段的长,请在图①中画出这条线段.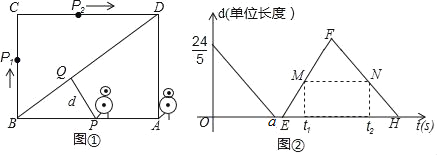
 在数轴上的位置如图所示:
在数轴上的位置如图所示: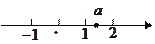
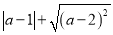 =________。
=________。