题目内容
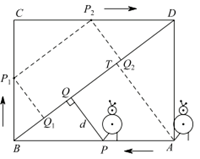
【题目】某校机器人兴趣小组在如图①所示的矩形场地上开展训练.机器人从点 ![]() 出发,在矩形
出发,在矩形 ![]() 边上沿着
边上沿着 ![]() 的方向匀速移动,到达点
的方向匀速移动,到达点 ![]() 时停止移动.已知机器人的速度为
时停止移动.已知机器人的速度为 ![]() 个单位长度/
个单位长度/ ![]() ,移动至拐角处调整方向需要
,移动至拐角处调整方向需要 ![]()
![]() (即在
(即在 ![]() 、
、 ![]() 处拐弯时分别用时
处拐弯时分别用时 ![]()
![]() ).设机器人所用时间为
).设机器人所用时间为 ![]() 时,其所在位置用点
时,其所在位置用点 ![]() 表示,
表示, ![]() 到对角线
到对角线 ![]() 的距离(即垂线段
的距离(即垂线段 ![]() 的长)为
的长)为 ![]() 个单位长度,其中
个单位长度,其中 ![]() 与
与 ![]() 的函数图像如图②所示.
的函数图像如图②所示.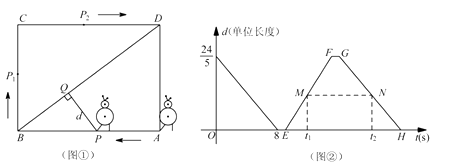
(1)求 ![]() 、
、 ![]() 的长;
的长;
(2)如图②,点 ![]() 、
、 ![]() 分别在线段
分别在线段 ![]() 、
、 ![]() 上,线段
上,线段 ![]() 平行于横轴,
平行于横轴, ![]() 、
、 ![]() 的横坐标分别为
的横坐标分别为 ![]() 、
、 ![]() .设机器人用了
.设机器人用了 ![]() 到达点
到达点 ![]() 处,用了
处,用了 ![]() 到达点
到达点 ![]() 处(见图①).若
处(见图①).若 ![]() ,求
,求 ![]() 、
、 ![]() 的值.
的值.
【答案】
(1)
解:作AT⊥BD,垂足为T,由题意得,AB=8,AT=![]() 。
。
在Rt△ABT中,AB2=BT2+AT2,
∴BT=![]() .
.
∵tan∠ABD=![]() =
=![]() ,
,
∴AD=6,即BC=6
(2)

解:在图①中,连接P1P2,过P1,P2分别作BD的垂线,垂足为Q1,Q2,则P1Q1//P2Q2,
∵在图②中,线段MN平行于横轴,
∴d1=d2,即P1Q1=P2Q2,
∴P1P2//BD,
∴△CP1P2~△CBD,
∴![]()
即![]()
又∵CP1+CP2=7,
∴CP1=3,CP2=4,
设M,N的横坐标分别为t1,t2,
由题意得,CP1=15-t1,CP2=t2-16,∴t1=12,t2=20
【解析】(1)点P在A点上时,d有最大值为![]() ,故可作AT⊥BD,垂足为T,当点P从A运动到B时,刚好d=0,则AB=8,根据勾股定理求得BT,则由tan∠ABD=
,故可作AT⊥BD,垂足为T,当点P从A运动到B时,刚好d=0,则AB=8,根据勾股定理求得BT,则由tan∠ABD=![]() =
=![]() 可求出AD;
可求出AD;
(2)首先观察图②可得点M和点N的纵坐标相等,即此时d1=d2,故可过P1 , P2分别作BD的垂线,垂足为Q1 , Q2 , 则P1Q1//P2Q2,且P1Q1=P2Q2 , 从而得到P1P2//BD,△CP1P2~△CBD,通过相似边求出CP1与CP2的数量关系,再由CP1+CP2=7,可解得CP1=3,CP2=4,从而求出时间t1和t2。

 数学奥赛暑假天天练南京大学出版社系列答案
数学奥赛暑假天天练南京大学出版社系列答案 南大教辅抢先起跑暑假衔接教程南京大学出版社系列答案
南大教辅抢先起跑暑假衔接教程南京大学出版社系列答案