题目内容
进行物理实验时,正确的操作是获取实验数据的前提.在“用电压表和电流表测小灯泡电阻”的实验中,下列操作中有问题的是( )
|
试题答案
D
相关题目
进行物理实验时,正确的操作是获取实验数据的前提.在“用电压表和电流表测小灯泡电阻”的实验中,下列操作中有问题的是( )
查看习题详情和答案>>
| A.连接电路的过程中,开关应处于断开状态 |
| B.连接电路的过程中,滑动变阻器要全部连入电路 |
| C.电流表要与待测电阻串联,电压表要与待测电阻并联 |
| D.试触时发现电流表指针反向偏转,电压表正常,只需断开电路,将电池正、负极对调 |
进行物理实验时,正确的操作是获取实验数据的前提.在“用电压表和电流表测小灯泡电阻”的实验中,下列操作中有问题的是( )
A.连接电路的过程中,开关应处于断开状态
B.连接电路的过程中,滑动变阻器要全部连入电路
C.电流表要与待测电阻串联,电压表要与待测电阻并联
D.试触时发现电流表指针反向偏转,电压表正常,只需断开电路,将电池正、负极对调
查看习题详情和答案>>
A.连接电路的过程中,开关应处于断开状态
B.连接电路的过程中,滑动变阻器要全部连入电路
C.电流表要与待测电阻串联,电压表要与待测电阻并联
D.试触时发现电流表指针反向偏转,电压表正常,只需断开电路,将电池正、负极对调
查看习题详情和答案>>
进行物理实验时,正确的操作是获取实验数据的前提.在“用电压表和电流表测小灯泡电阻”的实验中,下列操作中有问题的是
- A.连接电路的过程中,开关应处于断开状态
- B.连接电路的过程中,滑动变阻器要全部连入电路
- C.电流表要与待测电阻串联,电压表要与待测电阻并联
- D.试触时发现电流表指针反向偏转,电压表正常,只需断开电路,将电池正、负极对调
在“探究杠杆平衡条件”的实验中.
(1)实验前没有挂钩码时,若杠杆左端下倾,则应将平衡螺母向
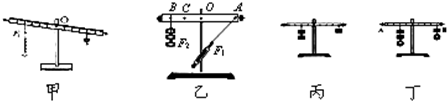
(2)使杠杆在倾斜一定角度的位置平衡(如图甲所示)做实验,也能得出杠杆平衡条件.这种实验方案与杠杆在水平位置平衡做实验的方案相比较,你认为哪种实验方案好并说明理由:
(3)同学们进行一次正确的实验操作后,又多次改变力和力臂的大小主要是为了
A.减小摩擦 B.使每组数据更准确
C.多次测量取平均值减小误差 D.获取多组实验数据归纳出物理规律
(4)在图乙中,杠杆水平平衡后,小强测出F1=1.2N,F2=1.5N;OA=30cm,OB=20cm.他将所得数据直接代入杠杆平衡条件的公式中,发现F1×OA和F2×OB并不相等,从而认为杠杆的平衡条件不一定是F1L1=F2L2.小强的失误
(5)如图丙所示的杠杆是平衡的.若如图丁所示,在支点两侧的物体下方分别加挂一个等重的物体,杠杆
A.仍能平衡 B.不能平衡,A端上升
C.不能平衡,B端上升 D.无法判断.
查看习题详情和答案>>
(1)实验前没有挂钩码时,若杠杆左端下倾,则应将平衡螺母向
右
右
(选填“左”或“右”)调节.调节直到杠杆在水平位置平衡为止.这一调节过程的目的是为了使杠杆的自重对杠杆平衡不产生影响,这时杠杆重力的力臂为从支点到挂钩码处杠杆的长度
从支点到挂钩码处杠杆的长度
.(2)使杠杆在倾斜一定角度的位置平衡(如图甲所示)做实验,也能得出杠杆平衡条件.这种实验方案与杠杆在水平位置平衡做实验的方案相比较,你认为哪种实验方案好并说明理由:
水平位置平衡的方案好,力臂在杠杆上,可以直接读出力臂
水平位置平衡的方案好,力臂在杠杆上,可以直接读出力臂
.(3)同学们进行一次正确的实验操作后,又多次改变力和力臂的大小主要是为了
D
D
A.减小摩擦 B.使每组数据更准确
C.多次测量取平均值减小误差 D.获取多组实验数据归纳出物理规律
(4)在图乙中,杠杆水平平衡后,小强测出F1=1.2N,F2=1.5N;OA=30cm,OB=20cm.他将所得数据直接代入杠杆平衡条件的公式中,发现F1×OA和F2×OB并不相等,从而认为杠杆的平衡条件不一定是F1L1=F2L2.小强的失误
把OA当成了F1的力臂(或把F1的力臂弄错了)
把OA当成了F1的力臂(或把F1的力臂弄错了)
.(5)如图丙所示的杠杆是平衡的.若如图丁所示,在支点两侧的物体下方分别加挂一个等重的物体,杠杆
B
B
A.仍能平衡 B.不能平衡,A端上升
C.不能平衡,B端上升 D.无法判断.
在探究“杠杆的平衡条件”实验中,所用的实验器材有杠杆、支架、刻度尺、细线、质量相同的钩码若干,弹簧测力计.

(1)将杠杆装在支架上,发现杠杆左端下沉,如图甲所示,此时应将杠杆的平衡螺母向
(2)当左侧钩码处于图乙所示A位置时,应
(3)某同学进行正确的实验操作后,得到的数据为F1=5N,L1=20cm,F2=2.5N和L2=40cm.该同学根据这些数据能否得出探究结论?
(4)考虑到弹簧测力计有自重,若弹簧测力计拿倒了,如图丙所示,测出的拉力将
查看习题详情和答案>>
(1)将杠杆装在支架上,发现杠杆左端下沉,如图甲所示,此时应将杠杆的平衡螺母向
右
右
(左/右)调,直到杠杆在水平位置平衡为止.(2)当左侧钩码处于图乙所示A位置时,应
竖直向下拉动弹簧测力计
竖直向下拉动弹簧测力计
,可使杠杆恢复水平位置平衡.(3)某同学进行正确的实验操作后,得到的数据为F1=5N,L1=20cm,F2=2.5N和L2=40cm.该同学根据这些数据能否得出探究结论?
不能
不能
.理由是只用一组数据得到结论,偶然性太大,应获取多组实验数据归纳出物理规律
只用一组数据得到结论,偶然性太大,应获取多组实验数据归纳出物理规律
.(4)考虑到弹簧测力计有自重,若弹簧测力计拿倒了,如图丙所示,测出的拉力将
变小
变小
(保持不变/变大/变小).在“探究杠杆平衡条件”的实验中.
(1)实验前没有挂钩码时,若杠杆左端下倾,则应将平衡螺母向______(选填“左”或“右”)调节.调节直到杠杆在水平位置平衡为止.这一调节过程的目的是为了使杠杆的自重对杠杆平衡不产生影响,这时杠杆重力的力臂为______.
(2)使杠杆在倾斜一定角度的位置平衡(如图甲所示)做实验,也能得出杠杆平衡条件.这种实验方案与杠杆在水平位置平衡做实验的方案相比较,你认为哪种实验方案好并说明理由:______.

(3)同学们进行一次正确的实验操作后,又多次改变力和力臂的大小主要是为了______
A.减小摩擦 B.使每组数据更准确
C.多次测量取平均值减小误差 D.获取多组实验数据归纳出物理规律
(4)在图乙中,杠杆水平平衡后,小强测出F1=1.2N,F2=1.5N;OA=30cm,OB=20cm.他将所得数据直接代入杠杆平衡条件的公式中,发现F1×OA和F2×OB并不相等,从而认为杠杆的平衡条件不一定是F1L1=F2L2.小强的失误______.
(5)如图丙所示的杠杆是平衡的.若如图丁所示,在支点两侧的物体下方分别加挂一个等重的物体,杠杆______
A.仍能平衡 B.不能平衡,A端上升
C.不能平衡,B端上升 D.无法判断.
查看习题详情和答案>>
在“探究杠杆平衡条件”的实验中.
(1)实验前没有挂钩码时,若杠杆左端下倾,则应将平衡螺母向______(选填“左”或“右”)调节.调节直到杠杆在水平位置平衡为止.这一调节过程的目的是为了使杠杆的自重对杠杆平衡不产生影响,这时杠杆重力的力臂为______.
(2)使杠杆在倾斜一定角度的位置平衡(如图甲所示)做实验,也能得出杠杆平衡条件.这种实验方案与杠杆在水平位置平衡做实验的方案相比较,你认为哪种实验方案好并说明理由:______.

(3)同学们进行一次正确的实验操作后,又多次改变力和力臂的大小主要是为了______
A.减小摩擦 B.使每组数据更准确
C.多次测量取平均值减小误差 D.获取多组实验数据归纳出物理规律
(4)在图乙中,杠杆水平平衡后,小强测出F1=1.2N,F2=1.5N;OA=30cm,OB=20cm.他将所得数据直接代入杠杆平衡条件的公式中,发现F1×OA和F2×OB并不相等,从而认为杠杆的平衡条件不一定是F1L1=F2L2.小强的失误______.
(5)如图丙所示的杠杆是平衡的.若如图丁所示,在支点两侧的物体下方分别加挂一个等重的物体,杠杆______
A.仍能平衡 B.不能平衡,A端上升
C.不能平衡,B端上升 D.无法判断.
查看习题详情和答案>>
(1)实验前没有挂钩码时,若杠杆左端下倾,则应将平衡螺母向______(选填“左”或“右”)调节.调节直到杠杆在水平位置平衡为止.这一调节过程的目的是为了使杠杆的自重对杠杆平衡不产生影响,这时杠杆重力的力臂为______.
(2)使杠杆在倾斜一定角度的位置平衡(如图甲所示)做实验,也能得出杠杆平衡条件.这种实验方案与杠杆在水平位置平衡做实验的方案相比较,你认为哪种实验方案好并说明理由:______.
(3)同学们进行一次正确的实验操作后,又多次改变力和力臂的大小主要是为了______
A.减小摩擦 B.使每组数据更准确
C.多次测量取平均值减小误差 D.获取多组实验数据归纳出物理规律
(4)在图乙中,杠杆水平平衡后,小强测出F1=1.2N,F2=1.5N;OA=30cm,OB=20cm.他将所得数据直接代入杠杆平衡条件的公式中,发现F1×OA和F2×OB并不相等,从而认为杠杆的平衡条件不一定是F1L1=F2L2.小强的失误______.
(5)如图丙所示的杠杆是平衡的.若如图丁所示,在支点两侧的物体下方分别加挂一个等重的物体,杠杆______
A.仍能平衡 B.不能平衡,A端上升
C.不能平衡,B端上升 D.无法判断.
查看习题详情和答案>>
 (2010?金山区二模)在“研究杠杆平衡条件”的实验中:
(2010?金山区二模)在“研究杠杆平衡条件”的实验中: