题目内容
在“探究杠杆平衡条件”的实验中.
(1)实验前没有挂钩码时,若杠杆左端下倾,则应将平衡螺母向
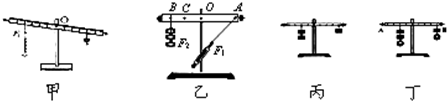
(2)使杠杆在倾斜一定角度的位置平衡(如图甲所示)做实验,也能得出杠杆平衡条件.这种实验方案与杠杆在水平位置平衡做实验的方案相比较,你认为哪种实验方案好并说明理由:
(3)同学们进行一次正确的实验操作后,又多次改变力和力臂的大小主要是为了
A.减小摩擦 B.使每组数据更准确
C.多次测量取平均值减小误差 D.获取多组实验数据归纳出物理规律
(4)在图乙中,杠杆水平平衡后,小强测出F1=1.2N,F2=1.5N;OA=30cm,OB=20cm.他将所得数据直接代入杠杆平衡条件的公式中,发现F1×OA和F2×OB并不相等,从而认为杠杆的平衡条件不一定是F1L1=F2L2.小强的失误
(5)如图丙所示的杠杆是平衡的.若如图丁所示,在支点两侧的物体下方分别加挂一个等重的物体,杠杆
A.仍能平衡 B.不能平衡,A端上升
C.不能平衡,B端上升 D.无法判断.
(1)实验前没有挂钩码时,若杠杆左端下倾,则应将平衡螺母向
右
右
(选填“左”或“右”)调节.调节直到杠杆在水平位置平衡为止.这一调节过程的目的是为了使杠杆的自重对杠杆平衡不产生影响,这时杠杆重力的力臂为从支点到挂钩码处杠杆的长度
从支点到挂钩码处杠杆的长度
.(2)使杠杆在倾斜一定角度的位置平衡(如图甲所示)做实验,也能得出杠杆平衡条件.这种实验方案与杠杆在水平位置平衡做实验的方案相比较,你认为哪种实验方案好并说明理由:
水平位置平衡的方案好,力臂在杠杆上,可以直接读出力臂
水平位置平衡的方案好,力臂在杠杆上,可以直接读出力臂
.(3)同学们进行一次正确的实验操作后,又多次改变力和力臂的大小主要是为了
D
D
A.减小摩擦 B.使每组数据更准确
C.多次测量取平均值减小误差 D.获取多组实验数据归纳出物理规律
(4)在图乙中,杠杆水平平衡后,小强测出F1=1.2N,F2=1.5N;OA=30cm,OB=20cm.他将所得数据直接代入杠杆平衡条件的公式中,发现F1×OA和F2×OB并不相等,从而认为杠杆的平衡条件不一定是F1L1=F2L2.小强的失误
把OA当成了F1的力臂(或把F1的力臂弄错了)
把OA当成了F1的力臂(或把F1的力臂弄错了)
.(5)如图丙所示的杠杆是平衡的.若如图丁所示,在支点两侧的物体下方分别加挂一个等重的物体,杠杆
B
B
A.仍能平衡 B.不能平衡,A端上升
C.不能平衡,B端上升 D.无法判断.
分析:(1)调节杠杆两端的平衡螺母,平衡螺母向上翘的一端移动,使杠杆在水平位置平衡.
(2)探究杠杆平衡条件时,杠杆在倾斜一定角度的位置进行实验,力臂不在杠杆上,不方便测量;杠杆在水平位置平衡,力臂在杠杆上,重力的力臂为从支点到挂钩码处杠杆的长度,便于读出力臂大小.
(3)实验时,如果只用一组数据得到结论,偶然性太大,因此应获取多组实验数据归纳出物理规律;
(4)由图可见,拉力F1的方向与杠杆不垂直,因此力臂不等于OA的长度,只有拉力方向与杠杆垂直时,拉力的力臂才等于支点到动力作用点的距离.
(5)丙图杠杆是平衡的,原因是两边的力和力臂的乘积相等,丁图分别加挂一个等重的物体后,分析两边的力和力臂的乘积是否还相等,据此判断丁图的杠杆是否还平衡.
(2)探究杠杆平衡条件时,杠杆在倾斜一定角度的位置进行实验,力臂不在杠杆上,不方便测量;杠杆在水平位置平衡,力臂在杠杆上,重力的力臂为从支点到挂钩码处杠杆的长度,便于读出力臂大小.
(3)实验时,如果只用一组数据得到结论,偶然性太大,因此应获取多组实验数据归纳出物理规律;
(4)由图可见,拉力F1的方向与杠杆不垂直,因此力臂不等于OA的长度,只有拉力方向与杠杆垂直时,拉力的力臂才等于支点到动力作用点的距离.
(5)丙图杠杆是平衡的,原因是两边的力和力臂的乘积相等,丁图分别加挂一个等重的物体后,分析两边的力和力臂的乘积是否还相等,据此判断丁图的杠杆是否还平衡.
解答:解:(1)杠杆左端下倾,右端上翘,应将杠杆右端螺母向右边移动一些,并使杠杆在水平位置平衡;杠杆在水平位置平衡,力臂在杠杆上,便于读出力臂大小
(2)探究杠杆平衡条件时,杠杆在倾斜一定角度的位置进行实验,力臂不在杠杆上,不方便测量;杠杆在水平位置平衡,力臂在杠杆上,便于读出力臂大小.
(3)探究杠杆平衡的条件时,多次改变力和力臂的大小主要是为了获取多组实验数据归纳出物理规律,故D正确;
(4)图乙中,拉力F1的方向与水平杠杆不垂直,只有力的方向与杠杆垂直时,力臂才能从杠杆上直接读出来,所以小强会得出错误的结论.
(5)设一钩码重为G,杠杆一格为L,丙图杠杆平衡是因为:2G×2L=G×4L;
丁图分别加挂一个等重的物体后:
左边:3G×2L,
右边:2G×4L,
∵3G×2L<2G×4L,
∴杠杆不能平衡,A端上升;
故选项B正确.
故答案为:(1)右;从支点到挂钩码处杠杆的长度;(2)水平位置平衡的方案好,力臂在杠杆上,可以直接读出力臂;(3)D;(4)把OA当成了F1的力臂(或把F1的力臂弄错了);(5)B.
(2)探究杠杆平衡条件时,杠杆在倾斜一定角度的位置进行实验,力臂不在杠杆上,不方便测量;杠杆在水平位置平衡,力臂在杠杆上,便于读出力臂大小.
(3)探究杠杆平衡的条件时,多次改变力和力臂的大小主要是为了获取多组实验数据归纳出物理规律,故D正确;
(4)图乙中,拉力F1的方向与水平杠杆不垂直,只有力的方向与杠杆垂直时,力臂才能从杠杆上直接读出来,所以小强会得出错误的结论.
(5)设一钩码重为G,杠杆一格为L,丙图杠杆平衡是因为:2G×2L=G×4L;
丁图分别加挂一个等重的物体后:
左边:3G×2L,
右边:2G×4L,
∵3G×2L<2G×4L,
∴杠杆不能平衡,A端上升;
故选项B正确.
故答案为:(1)右;从支点到挂钩码处杠杆的长度;(2)水平位置平衡的方案好,力臂在杠杆上,可以直接读出力臂;(3)D;(4)把OA当成了F1的力臂(或把F1的力臂弄错了);(5)B.
点评:本题考查了杠杆平衡的条件,在实验中我们应首先调节杠杆两端的平衡螺母,使杠杆在水平位置平衡,以便直接读出力臂;用弹簧测力计时,应注意竖直方向拉动测力计;注意杠杆平衡的条件:动力×动力臂=阻力×阻力臂的应用.

练习册系列答案
相关题目
 在探究杠杆平衡条件的实验中,如果杠杆右侧高左侧低,则可将左侧的平衡螺母向
在探究杠杆平衡条件的实验中,如果杠杆右侧高左侧低,则可将左侧的平衡螺母向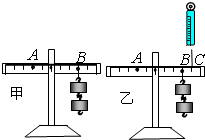 在探究杠杆平衡条件的实验中:
在探究杠杆平衡条件的实验中: 在“探究杠杆平衡条件”实验中:
在“探究杠杆平衡条件”实验中: 在探究杠杆平衡条件的实验中:
在探究杠杆平衡条件的实验中: 在“探究杠杆平衡条件”实验中:
在“探究杠杆平衡条件”实验中: