摘要:列表如下:x(0,1)1
网址:http://m.1010jiajiao.com/timu_id_191849[举报]
如图,根据指令(γ,θ)(γ≥0,-180°<θ≤180°),机器人在平面上能完成下列动作:先原地旋转角度θ(θ为正时,按逆时针方向旋转θ,θ为负时,按顺时针方向旋转θ),再朝其面对的方向沿直线行走距离γ.
(1)现机器人在平面直角坐标系的坐标原点,且面对x轴正方向.试给机器人下一个指令,使其移动到点(4,4).
(2)机器人在完成该指令后,发现在点(17,0)处有一小球 正向坐标原点作匀速直线滚动.已知小球滚动的速度为机器人直线行走速度的2倍,若忽略机器人原地旋转所需的时间,问机器人最快可在何处截住小球?并给出机器人截住小球所需的指令(结果用反三角函数表示).
如图,根据指令(γ,θ)(γ≥0,-180°<θ≤180°),机器人在平面上能完成下列动作:先原地旋转角度θ(θ为正时,按逆时针方向旋转θ,θ为负时,按顺时针方向旋转θ),再朝其面对的方向沿直线行走距离γ.
(1)现机器人在平面直角坐标系的坐标原点,且面对x轴正方向.试给机器人下一个指令,使其移动到点(4,4).
(2)机器人在完成该指令后,发现在点(17,0)处有一小球 正向坐标原点作匀速直线滚动.已知小球滚动的速度为机器人直线行走速度的2倍,若忽略机器人原地旋转所需的时间,问机器人最快可在何处截住小球?并给出机器人截住小球所需的指令(结果用反三角函数表示).
(1)现机器人在平面直角坐标系的坐标原点,且面对x轴正方向.试给机器人下一个指令,使其移动到点(4,4).
(2)机器人在完成该指令后,发现在点(17,0)处有一小球 正向坐标原点作匀速直线滚动.已知小球滚动的速度为机器人直线行走速度的2倍,若忽略机器人原地旋转所需的时间,问机器人最快可在何处截住小球?并给出机器人截住小球所需的指令(结果用反三角函数表示).
 给出下列四个命题:
给出下列四个命题:①已知函数y=2sin(x+φ)(0<φ<π)的图象如图所示,则?=
| π |
| 6 |
| 5 |
| 6 |
②已知O、A、B、C是平面内不同的四点,且
| OA |
| OB |
| OC |
③若数列an恒满足
| ||
|
④求解关于变量m、n的不定方程3n-2=2m-1(n,m∈N*),可以得到该方程中变量n的所有取值的表达式为n=
| 1 |
| 12 |
(k∈N*).
其中正确命题的序号是
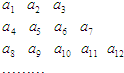 将数列{an} 中的所有项按第一排三项,以下每一行比上一行多一项的规则排成如数表:记表中的第一列数a1,a4,a8,…构成的数列为{bn},已知:
将数列{an} 中的所有项按第一排三项,以下每一行比上一行多一项的规则排成如数表:记表中的第一列数a1,a4,a8,…构成的数列为{bn},已知:①在数列{bn} 中,b1=1,对于任何n∈N*,都有(n+1)bn+1-nbn=0;
②表中每一行的数按从左到右的顺序均构成公比为q(q>0)的等比数列;
③a66=
| 2 |
| 5 |
(1)求数列{bn} 的通项公式;
(2)求上表中第k(k∈N*)行所有项的和S(k);
(3)若关于x的不等式S(k)+
| 1 |
| k |
| 1-x2 |
| x |
| 1 |
| 1000 |
| 1 |
| 100 |
给出下列四个结论:
(1)合情推理是由特殊到一般的推理,得到的结论不一定正确,演绎推理是由一般到特殊的推理,得到的结论一定正确;
(2)一般地,当r的绝对值大于0.75时,认为两个变量之间有很强的线性相关关系,如果变量y与x之间的相关系数r=-0.9568,则变量y与x之间具有线性关系;
(3)用独立性检验(2×2列联表法)来考察两个分类变量是否有关系时,算出的随机变量x2的值越大,说明“x与y有关系”成立的可能性越大;
(4)已知a,b∈R,若a-b>0则a>b;同样的已知a,b∈C(C为复数集)若a-b>0则a>b.
其中结论正确的序号为
查看习题详情和答案>>
(1)合情推理是由特殊到一般的推理,得到的结论不一定正确,演绎推理是由一般到特殊的推理,得到的结论一定正确;
(2)一般地,当r的绝对值大于0.75时,认为两个变量之间有很强的线性相关关系,如果变量y与x之间的相关系数r=-0.9568,则变量y与x之间具有线性关系;
(3)用独立性检验(2×2列联表法)来考察两个分类变量是否有关系时,算出的随机变量x2的值越大,说明“x与y有关系”成立的可能性越大;
(4)已知a,b∈R,若a-b>0则a>b;同样的已知a,b∈C(C为复数集)若a-b>0则a>b.
其中结论正确的序号为
(2)(3)
(2)(3)
.(写出你认为正确的所有结论的序号)